เครื่องกำเนิดพัลส์ใช้สำหรับการวิจัยในห้องปฏิบัติการในการพัฒนาและปรับแต่งอุปกรณ์อิเล็กทรอนิกส์ เครื่องกำเนิดไฟฟ้าทำงานในช่วงแรงดันไฟฟ้าตั้งแต่ 7 ถึง 41 โวลต์และความสามารถในการรับน้ำหนักสูงขึ้นอยู่กับทรานซิสเตอร์เอาต์พุต แอมพลิจูดของพัลส์เอาท์พุตสามารถเท่ากับค่าของแรงดันไฟฟ้าของไมโครวงจรได้ถึงค่าขีด จำกัด ของแรงดันไฟฟ้าของไมโครวงจรนี้ +41 V.

อะนาล็อก TL494 คือไมโครวงจร KA7500 และโคลนในประเทศของเธอ - KR1114EU4 .
จำกัด ค่าพารามิเตอร์:
แรงดันไฟฟ้า 41V
แรงดันไฟฟ้าอินพุตของเครื่องขยายเสียง (Vcc + 0.3) V.
แรงดันเอาท์พุทสะสม 41V
กระแสไฟขาออกของนักสะสม 250mA
การกระจายพลังงานทั้งหมดในโหมดต่อเนื่อง 1W
ช่วงอุณหภูมิในการทำงานโดยรอบ:
-c ต่อท้าย L -25..85С
- ด้วยคำต่อท้ายС.0..70С
ช่วงอุณหภูมิการจัดเก็บ -65 ... + 150C
แผนผังของอุปกรณ์

วงจรกำเนิดพัลส์สี่เหลี่ยม
เครื่องกำเนิด PCB เปิดอยู่ TL494 และไฟล์อื่น ๆ แยกจากกัน

ความถี่ถูกควบคุมโดยสวิตช์ S2 (หยาบ) และตัวต้านทาน RV1 (ราบรื่น) รอบการทำงานถูกควบคุมโดยตัวต้านทาน RV2 Switch SA1 เปลี่ยนโหมดการทำงานของเครื่องกำเนิดไฟฟ้าจาก in-phase (single-ended) เป็น anti-phase (push-pull) ตัวต้านทาน R3 เลือกช่วงความถี่ที่ทับซ้อนกันที่เหมาะสมที่สุดสามารถเลือกช่วงของการปรับรอบการทำงานได้ด้วยตัวต้านทาน R1, R2

ชิ้นส่วนเครื่องกำเนิดพัลส์
ตัวเก็บประจุ C1-C4 ของวงจรจับเวลาถูกเลือกสำหรับช่วงความถี่ที่ต้องการและความจุของพวกเขาสามารถมีได้ตั้งแต่ 10 ไมโครฟารัดสำหรับช่วงต่ำอินฟาเรดไปจนถึง 1,000 พิโคฟารัดสำหรับความถี่สูงสุด
เมื่อกระแสไฟฟ้าเฉลี่ยถูก จำกัด ไว้ที่ 200 mA วงจรจะสามารถชาร์จประตูได้อย่างรวดเร็ว แต่
เป็นไปไม่ได้ที่จะระบายออกด้วยทรานซิสเตอร์ที่ปิดอยู่ การปล่อยเกตด้วยตัวต้านทานที่ต่อสายดินก็ช้าอย่างไม่น่าพอใจเช่นกัน เพื่อวัตถุประสงค์เหล่านี้จะใช้ตัวทำซ้ำเสริมอิสระ

- อ่าน: "วิธีทำจากคอมพิวเตอร์"
เครื่องกำเนิดไฟฟ้าบน TL494 พร้อมความถี่และรอบการทำงานที่ปรับได้
อุปกรณ์ที่มีประโยชน์มากสำหรับการทดลองและงานปรับแต่งคือเครื่องกำเนิดความถี่ ข้อกำหนดสำหรับมันมีขนาดเล็กคุณต้องการเพียง:
- การปรับความถี่ (ระยะเวลาการทำซ้ำของพัลส์)
- การปรับรอบการทำงาน (รอบการทำงาน, ความยาวพัลส์)
- หลากหลาย
ช่วงการปรับความถี่ของเครื่องกำเนิดไฟฟ้านั้นสูงมากตั้งแต่หลายสิบเฮิรตซ์ถึง 500 กิโลเฮิรตซ์และในบางกรณี - สูงถึง 1 เมกะเฮิรตซ์ขึ้นอยู่กับวงจรขนาดเล็กผู้ผลิตหลายรายมีค่าจริงที่แตกต่างกันของความถี่สูงสุดที่สามารถบีบออกได้

ไปที่คำอธิบายของวงจร:
Pit ±และ Pit ~ - แหล่งจ่ายไฟของส่วนดิจิตอลของวงจรที่มีแรงดันคงที่และสลับตามลำดับ 16-20 โวลต์
Vout - แรงดันไฟฟ้าของแหล่งจ่ายไฟจะอยู่ที่เอาต์พุตของเครื่องกำเนิดไฟฟ้าตั้งแต่ 12 โวลต์ ในการจ่ายไฟให้กับส่วนดิจิตอลของวงจรจากแรงดันไฟฟ้านี้จำเป็นต้องเชื่อมต่อ Vout และ Pit ±โดยคำนึงถึงขั้ว (จาก 16 โวลต์)
OUT (+ / D) - กำลังขับของเครื่องกำเนิดไฟฟ้าโดยคำนึงถึงขั้ว + - แหล่งจ่ายไฟบวก D - ท่อระบายน้ำของทรานซิสเตอร์ฟิลด์เอฟเฟกต์ โหลดเชื่อมต่อกับพวกเขา
G D S - บล็อกสกรูสำหรับเชื่อมต่อทรานซิสเตอร์เอฟเฟกต์สนามซึ่งถูกเลือกตามพารามิเตอร์ขึ้นอยู่กับความต้องการของคุณสำหรับความถี่และพลังงาน เค้าโครงของแผงวงจรพิมพ์นั้นคำนึงถึงความยาวขั้นต่ำของตัวนำไปยังคีย์เอาต์พุตและความกว้างที่ต้องการ
หน่วยงานที่กำกับดูแล:
Rt เป็นตัวต้านทานตัวแปรสำหรับควบคุมช่วงความถี่ของเครื่องกำเนิดไฟฟ้าต้องเลือกความต้านทานตามความต้องการเฉพาะของคุณ เครื่องคิดเลขออนไลน์สำหรับคำนวณความถี่ TL494 แนบอยู่ด้านล่าง ตัวต้านทาน R2 จำกัด ค่าต่ำสุดของความต้านทานของตัวต้านทานเวลาของไมโครวงจร สามารถเลือกได้สำหรับอินสแตนซ์เฉพาะของไมโครวงจรหรือจะตั้งค่าตามในแผนภาพก็ได้
Ct - ตัวเก็บประจุที่ตั้งค่าความถี่อ้างอิงอีกครั้งกับเครื่องคิดเลขออนไลน์ ให้คุณตั้งค่าช่วงการปรับแต่งให้เหมาะกับความต้องการของคุณ
Rdt - ตัวต้านทานตัวแปรสำหรับการปรับรอบการทำงาน ตัวต้านทาน R1 สามารถใช้เพื่อปรับแต่งช่วงการปรับค่าได้ตั้งแต่ 1% ถึง 99% คุณยังสามารถใส่จัมเปอร์แทนได้
| กะรัต, nF: | |
| R2, kOhm: | |
| Rt, kOhm: |
คำสองสามคำเกี่ยวกับการทำงานของวงจร ด้วยการจ่ายระดับต่ำไปยังเอาต์พุตที่ 13 ของไมโครเซอร์กิต (การควบคุมเอาต์พุต) จะถูกโอนไปยังโหมดรอบเดียว ทรานซิสเตอร์ตัวล่างของไมโครวงจรจะถูกโหลดลงบนตัวต้านทาน R3 เพื่อสร้างเอาต์พุตสำหรับเชื่อมต่อเครื่องวัดความถี่ (เครื่องวัดความถี่) กับเครื่องกำเนิดไฟฟ้า ทรานซิสเตอร์ตัวบนของไมโครเซอร์กิตควบคุมไดรเวอร์บนทรานซิสเตอร์คู่เสริม S8050 และ S8550 ซึ่งมีหน้าที่ควบคุมเกตของทรานซิสเตอร์เอาต์พุตกำลัง ตัวต้านทาน R5 จำกัด กระแสเกตค่าของมันสามารถเปลี่ยนแปลงได้ Choke L1 และตัวเก็บประจุ 47n เป็นตัวกรองเพื่อป้องกัน TL494 จากสัญญาณรบกวนที่อาจเกิดขึ้นจากไดรเวอร์ การเหนี่ยวนำโช้กอาจต้องตรงกับช่วงความถี่ของคุณ ควรสังเกตว่าทรานซิสเตอร์ S8050 และ S8550 ไม่ได้ถูกเลือกโดยบังเอิญเนื่องจากมีกำลังและความเร็วเพียงพอซึ่งจะให้ความชันที่จำเป็นของด้านหน้า อย่างที่คุณเห็นโครงร่างนั้นเรียบง่ายมากและในเวลาเดียวกันก็ใช้งานได้
ตัวต้านทานแบบแปรผัน Rt ควรทำในรูปแบบของตัวต้านทานที่เชื่อมต่อแบบอนุกรมสองตัว - แบบเลี้ยวเดียวและหลายรอบหากคุณต้องการการควบคุมความถี่ที่ราบรื่นและแม่นยำ
แผงวงจรพิมพ์ตามประเพณี
ตอนที่ฉันเพิ่งเริ่มทำอุปกรณ์อิเล็กทรอนิกส์ทางวิทยุเวิร์กชอปของฉันเต็มไปด้วยสมุดบันทึกแผ่นพับที่มีการคำนวณสูตรและสิ่งอื่น ๆ อีกมากมาย ตอนนี้เมื่อคอมพิวเตอร์อยู่ไกลจากความหรูหราคุณสามารถทำให้ชีวิตของคุณง่ายขึ้นเล็กน้อยโดยใช้โปรแกรมสำหรับนักวิทยุสมัครเล่น โปรแกรมทั้งหมดนำเสนอเพื่อจุดประสงค์ในการให้ข้อมูลฉันขอแนะนำให้ดาวน์โหลดเวอร์ชันดั้งเดิมของโปรแกรมจากเว็บไซต์ของผู้พัฒนา
เป็นชุดของโปรแกรมที่แตกต่างกันสำหรับการคำนวณหม้อแปลงชนิดต่างๆโช้กและการกำหนดความสามารถในการซึมผ่านของแกน นอกจากนี้การคำนวณความถี่ของชิป 3525 และ 3842-3845
โปรแกรมเหล่านี้ได้แสดงตัวตนในบทความ
Splan70 จากAbacom 
โปรแกรมสำหรับวาดวงจรอิเล็กทรอนิกส์ ชุดซอฟต์แวร์มีฐานข้อมูลขนาดใหญ่ของชิ้นส่วนอิเล็กทรอนิกส์ต่างๆรวมทั้งตัวแก้ไขเพื่อวาดส่วนประกอบของคุณ
ฉันเคยใช้โปรแกรมเพื่อวาดวงจรตอนนี้ฉันใช้ Multisim สำหรับสิ่งนี้
โปรแกรมสำหรับการตรวจสอบ

โปรแกรมจำลองที่มีประสิทธิภาพมากสำหรับการทดสอบวงจรเบื้องต้นและการกำหนดค่า ความคิดส่วนใหญ่ที่อยู่ในความคิดของฉันฉันคิดก่อนในโปรแกรมจำลองจากนั้นฉันก็นำไปใช้ในฮาร์ดแวร์และกำหนดค่าในที่สุด
Multisim มีส่วนประกอบขนาดใหญ่บนบอร์ดที่ช่วยให้คุณจำลองวงจรได้เกือบทุกแบบ มีเครื่องมือหลากหลายตั้งแต่มัลติมิเตอร์ไปจนถึงเครื่องกำเนิดไฟฟ้าที่ทรงพลัง
ดาวน์โหลดโปรแกรมจากเว็บไซต์ของผู้พัฒนา
วิ่งเลย์ออก 6 จากAbacom 
นี่เป็นเครื่องมือแก้ไขที่ยอดเยี่ยมสำหรับการวาดแผงวงจรพิมพ์ด้านเดียวและสองด้าน
มีฐานมาโครขนาดใหญ่คุณสามารถเพิ่มมาโครได้ด้วยตัวเอง
แผงวงจรพิมพ์ทั้งหมดถูกวาดในตัวแก้ไขนี้
โปรแกรมสำหรับการตรวจสอบ
มีการอธิบายแพ็คเกจซอฟต์แวร์หลักไว้แล้วนอกจากนี้ยังมีโปรแกรมรองที่ไม่ค่อยมี แต่ก็ยังใช้อยู่

นี่เป็นโปรแกรมสำหรับการเข้ารหัสและการทำเครื่องหมายสีของตัวต้านทานฉันเคยใช้มันอย่างแข็งขัน ตอนนี้ฉันรู้ทุกอย่างด้วยใจ แต่บางครั้งเพื่อความแน่ใจฉันตรวจสอบผลลัพธ์ด้วยโปรแกรมนี้
โปรแกรมสำหรับการตรวจสอบ

โปรแกรมคำนวณแหล่งจ่ายไฟหม้อแปลงสำหรับเครื่องขยายเสียง คำนึงถึงลักษณะเฉพาะของการใช้พลังงานระหว่างการสร้างเสียง
โปรแกรมสำหรับการตรวจสอบ
Regulatorสิ่งที่ต้องการ 1.2นาซาร์ 
เฉพาะสิ่งที่สำคัญที่สุด
แรงดันไฟฟ้า 8-35v (ดูเหมือนจะเป็นไปได้ถึง 40v แต่ไม่ได้ทดสอบ)
ความเป็นไปได้ในการทำงานในโหมดจังหวะเดียวและสองจังหวะ
สำหรับโหมดรอบเดียวความกว้างพัลส์สูงสุดคือ 96% (เวลาตายไม่น้อยกว่า 4%)
สำหรับรุ่นสองจังหวะเวลาตายต้องไม่น้อยกว่า 4%
การใช้แรงดันไฟฟ้า 0 ... 3.3V ถึงพิน 4 คุณสามารถปรับเวลาตายได้ และเริ่มต้นอย่างราบรื่น
มีแหล่งจ่ายแรงดันอ้างอิงที่เสถียรในตัว 5V และกระแสสูงถึง 10mA
มีการป้องกันแรงดันตกในตัวโดยปิดที่ต่ำกว่า 5.5 ... 7V (ส่วนใหญ่มักเป็น 6.4V) ปัญหาคือด้วยแรงดันไฟฟ้าดังกล่าว mosfets จะเข้าสู่โหมดเชิงเส้นแล้วและไหม้ ...
เป็นไปได้ที่จะปิดเครื่องกำเนิดไฟฟ้าไมโครเซอร์กิตโดยปิดพิน Rt (6) (14) หรือ Ct (5) ลงกราวด์ด้วยกุญแจ
ความถี่ในการทำงาน 1 ... 300 kHz.
แอมพลิฟายเออร์การทำงานที่มี "ข้อผิดพลาด" ในตัวสองตัวที่มีอัตราขยาย Ku \u003d 70..95 dB อินพุต - เอาต์พุต (1); (2) และ (15); (สิบหก). เอาต์พุตของแอมพลิฟายเออร์เชื่อมต่อกันด้วยองค์ประกอบ OR ดังนั้นหนึ่งที่เอาต์พุตซึ่งแรงดันไฟฟ้าสูงกว่าและควบคุมระยะเวลาพัลส์ หนึ่งในอินพุตของตัวเปรียบเทียบมักจะเชื่อมโยงกับแรงดันไฟฟ้าอ้างอิง (14) และอีกตัวหนึ่ง - ทุกที่ที่คุณต้องการ ... ความล่าช้าของสัญญาณภายในแอมพลิฟายเออร์คือ 400 ns ซึ่งไม่ได้ออกแบบมาให้ทำงานภายในหนึ่งรอบนาฬิกา
ขั้นตอนการส่งออกของไมโครเซอร์กิตที่มีกระแสเฉลี่ย 200mA เร็วพอที่จะชาร์จความจุอินพุตของประตูมอสเฟตที่ทรงพลัง แต่อย่าให้แน่ใจว่ามีการคายประจุ ในเวลาอันสมควร ในการเชื่อมต่อนี้จำเป็นต้องใช้ไดรเวอร์ภายนอก
เอาต์พุต (5) ตัวเก็บประจุ C2 และเอาต์พุต (6) ตัวต้านทาน R3; R4 - ตั้งค่าความถี่ของเครื่องกำเนิดไฟฟ้าภายในของไมโครวงจร ในโหมดสองจังหวะมันหารด้วย 2 ได้
มีความเป็นไปได้ในการซิงโครไนซ์ทริกเกอร์โดยพัลส์อินพุต
เครื่องกำเนิดไฟฟ้ารอบเดียวพร้อมการควบคุมความถี่และรอบการทำงาน
เครื่องกำเนิดไฟฟ้ารอบเดียวพร้อมความถี่และรอบการทำงานที่ปรับได้ (อัตราส่วนของระยะเวลาพัลส์ต่อระยะเวลาหยุดชั่วคราว) ด้วยไดรเวอร์เอาต์พุตทรานซิสเตอร์หนึ่งตัว โหมดนี้จะรับรู้หากพิน 13 เชื่อมต่อกับเพาเวอร์บัสทั่วไป
โครงการ (1)
เนื่องจากไมโครวงจรมีสองขั้นตอนการส่งออกซึ่งในกรณีนี้ทำงานในเฟสเพื่อเพิ่มกระแสไฟฟ้าขาออกคุณสามารถเปิดแบบขนาน ... หรือไม่เปิด ... (เป็นสีเขียวบนแผนภาพ) ตัวต้านทาน R7 จึงไม่ได้ติดตั้งเสมอไป
ด้วยการวัดแรงดันไฟฟ้าข้ามตัวต้านทาน R10 ด้วย op-amp คุณสามารถ จำกัด กระแสเอาต์พุตได้ อินพุตที่สองมาพร้อมกับแรงดันอ้างอิงโดยตัวแบ่ง R5; R6. คุณรู้ไหมว่า R10 จะอุ่นเครื่อง
โซ่ C6; R11 บนขา (3) ถูกวางไว้เพื่อความมั่นคงยิ่งขึ้นแผ่นข้อมูลถาม แต่ใช้งานได้หากไม่มี ทรานซิสเตอร์สามารถถ่ายและโครงสร้าง npn

โครงการ (2)

โครงการ (3)
เครื่องกำเนิดไฟฟ้ารอบเดียวพร้อมความถี่และรอบการทำงานที่ปรับได้ ด้วยไดรเวอร์เอาต์พุตทรานซิสเตอร์สองตัว (ตัวทำซ้ำเสริม)
ฉันจะว่าอย่างไรได้? รูปคลื่นดีกว่าชั่วคราวที่เวลาในการเปลี่ยนจะลดลงความสามารถในการรับน้ำหนักสูงขึ้นการสูญเสียความร้อนน้อยลง แม้ว่านี่อาจเป็นความคิดเห็นส่วนตัว แต่. ตอนนี้ฉันใช้ไดร์เวอร์ทรานซิสเตอร์สองตัวเท่านั้น ใช่ตัวต้านทานในวงจรประตูจะ จำกัด อัตราการเปลี่ยนชั่วคราว

โครงการ (4)
และที่นี่เรามีวงจรของตัวแปลงแบบปลายเดี่ยวที่มีการควบคุมการเพิ่มประสิทธิภาพโดยทั่วไปพร้อมการควบคุมแรงดันไฟฟ้าและการ จำกัด กระแส
ฉันรวบรวมโครงร่างการทำงานในหลายเวอร์ชัน แรงดันขาออกขึ้นอยู่กับจำนวนรอบของขดลวด L1 และความต้านทานของตัวต้านทาน R7 R10; R11 ซึ่งถูกเลือกระหว่างการปรับแต่ง ... ขดลวดเองสามารถพันกับอะไรก็ได้ ขนาด - ขึ้นอยู่กับกำลังไฟ Ring, W-core แม้เพียงแค่บนแกน แต่ไม่ควรเข้าสู่ภาวะอิ่มตัว ดังนั้นหากแหวนทำจากเฟอร์ไรต์คุณต้องตัดและกาวด้วยช่องว่าง วงแหวนขนาดใหญ่จากแหล่งจ่ายไฟของคอมพิวเตอร์จะทำได้ดีไม่จำเป็นต้องตัดพวกเขาทำจาก "เหล็กพ่น" ที่มีช่องว่างอยู่แล้ว ถ้าแกนกลางเป็นรูปตัว W - เราใส่ช่องว่างที่ไม่ใช่แม่เหล็กบางครั้งก็มีแกนกลางสั้น - สิ่งเหล่านี้มีช่องว่างอยู่แล้ว ในระยะสั้นเราพันด้วยทองแดงหนาหรือลวดยึด (0.5-1.0 มม. ขึ้นอยู่กับกำลังไฟ) และจำนวนรอบคือ 10 หรือมากกว่า (ขึ้นอยู่กับแรงดันไฟฟ้าที่เราต้องการรับ) เราเชื่อมต่อโหลดกับแรงดันไฟฟ้าต่ำที่วางแผนไว้ เราเชื่อมต่อการสร้างสรรค์ของเรากับแบตเตอรี่ผ่านหลอดไฟอันทรงพลัง หากหลอดไฟไม่สว่างขึ้นเมื่อมีการหลอมละลายเต็มเราจะใช้โวลต์มิเตอร์และออสซิลโลสโคป ...
เราเลือกตัวต้านทาน R7; R10; R11 และจำนวนรอบของขดลวด L1 เพื่อให้ได้แรงดันไฟฟ้าที่ต้องการตลอดโหลด
Choke Dr1 - 5 ... 10 รอบด้วยลวดหนาที่แกนใดก็ได้ ฉันยังเห็นตัวเลือกที่ L1 และ Dr1 อยู่บนแกนเดียวกัน ฉันไม่ได้ตรวจสอบด้วยตัวเอง

โครงการ (5)
นอกจากนี้ยังเป็นวงจรแปลงบูสต์ที่สามารถใช้เพื่อชาร์จแล็ปท็อปจากแบตเตอรี่รถยนต์ได้ ตัวเปรียบเทียบบนอินพุต (15); (16) ตรวจสอบแรงดันไฟฟ้าของแบตเตอรี่ "ผู้บริจาค" และปิดตัวแปลงเมื่อแรงดันไฟฟ้าลดลงต่ำกว่าเกณฑ์ที่เลือก
โซ่ C8; R12; VD2 - สิ่งที่เรียกว่า Snubber ได้รับการออกแบบมาเพื่อยับยั้งการปล่อยอุปนัย บันทึก MOSFET แรงดันไฟฟ้าต่ำเช่น IRF3205 ทนต่อถ้าฉันไม่เข้าใจผิด (ท่อระบายน้ำ - แหล่งที่มา) ได้ถึง 50V อย่างไรก็ตามจะลดประสิทธิภาพลงอย่างมาก ทั้งไดโอดและตัวต้านทานร้อนขึ้นอย่างเหมาะสม เพิ่มความน่าเชื่อถือ ในบางโหมด (วงจร) หากไม่มีทรานซิสเตอร์ที่ทรงพลังก็จะไหม้ทันที และบางครั้งก็ใช้งานได้หากไม่มีทั้งหมดนี้ ... คุณต้องดูที่ออสซิลโลสโคป ...

โครงการ (6)
ออสซิลเลเตอร์หลักสองจังหวะ
เวอร์ชันต่างๆและการปรับเปลี่ยน
เมื่อมองแวบแรกรูปแบบการเชื่อมต่อที่หลากหลายจะลดจำนวนลงเหลือน้อยกว่าสำหรับการใช้งานจริงๆ ... สิ่งแรกที่ฉันมักจะทำเมื่อเห็นรูปแบบที่ "ยุ่งยาก" คือการวาดใหม่ในมาตรฐานที่ฉันคุ้นเคย ก่อนหน้านี้เรียกว่า GOST ตอนนี้ยังไม่ชัดเจนว่าพวกเขาวาดอย่างไรซึ่งทำให้การรับรู้ยากมาก และซ่อนความผิดพลาด ฉันคิดว่าสิ่งนี้มักจะทำโดยมีวัตถุประสงค์
เครื่องกำเนิดไฟฟ้าหลักสำหรับครึ่งสะพานหรือสะพาน นี่คือเครื่องกำเนิดไฟฟ้าที่ง่ายที่สุดระยะเวลาพัลส์และความถี่สามารถปรับได้ด้วยตนเอง ออปโตคัปเปลอร์ที่ขา (3) ยังสามารถปรับระยะเวลาได้ แต่การปรับจะคมมาก ฉันเคยขัดจังหวะไมโครเซอร์กิต "ผู้ทรงคุณวุฒิ" บางคนกล่าวว่าเป็นไปไม่ได้ที่จะควบคุมโดย (3) เอาต์พุตไมโครวงจรจะไหม้ แต่ประสบการณ์ของฉันยืนยันประสิทธิภาพ การตัดสินใจครั้งนี้... อย่างไรก็ตามมันถูกใช้ในอินเวอร์เตอร์เชื่อมสำเร็จ
Nikolay Petrushov
TL494 "สัตว์ร้าย" ตัวนี้คืออะไร?
TL494 (Texas Instruments) น่าจะเป็นตัวควบคุม PWM ที่ใช้กันมากที่สุดโดยมีการสร้างอุปกรณ์จ่ายไฟคอมพิวเตอร์จำนวนมากและชิ้นส่วนพลังงานของเครื่องใช้ในครัวเรือนต่างๆ
และแม้กระทั่งตอนนี้ไมโครเซอร์กิตนี้ก็เป็นที่นิยมในหมู่นักวิทยุสมัครเล่นที่มีส่วนร่วมในการสร้างอุปกรณ์จ่ายไฟแบบสวิตชิ่ง อะนาล็อกในประเทศของไมโครวงจรนี้คือМ1114ЕУ4 (КР1114ЕУ4) นอกจากนี้ บริษัท ต่างประเทศหลายแห่งยังผลิตไมโครวงจรนี้ด้วยชื่อที่แตกต่างกัน ตัวอย่างเช่น IR3M02 (Sharp), KA7500 (Samsung), MB3759 (Fujitsu) ทั้งหมดนี้เป็นวงจรเดียวและเหมือนกัน
อายุของเธออ่อนกว่า TL431 มาก เริ่มผลิตโดย Texas Instruments ในช่วงปลายยุค 90 - ต้นปี 2000
มาลองคิดกันดูว่าเธอคืออะไรและเป็น "สัตว์ร้าย" แบบไหน? เราจะพิจารณาชิป TL494 (Texas Instruments)
ก่อนอื่นเรามาดูว่ามีอะไรอยู่ในตัวเธอ
องค์ประกอบ
ประกอบด้วย:
- เครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อย (GPN);
- ตัวเปรียบเทียบการปรับเวลาตาย (DA1);
- ตัวเปรียบเทียบการปรับ PWM (DA2);
- เครื่องขยายสัญญาณข้อผิดพลาด 1 (DA3) ใช้สำหรับแรงดันไฟฟ้าเป็นหลัก
- แอมพลิฟายเออร์ข้อผิดพลาด 2 (DA4) ส่วนใหญ่ใช้โดยสัญญาณ จำกัด ปัจจุบัน
- แหล่งจ่ายแรงดันอ้างอิงที่เสถียร (ION) ที่ 5V พร้อมขาภายนอก 14
- วงจรควบคุมของขั้นตอนการส่งออก
จากนั้นเราจะพิจารณาส่วนที่เป็นส่วนประกอบทั้งหมดและพยายามหาว่าทั้งหมดนี้มีไว้เพื่ออะไรและทำงานอย่างไร แต่ก่อนอื่นจำเป็นต้องนำพารามิเตอร์การทำงาน (คุณลักษณะ) มาด้วย
| ตัวเลือก | นาที. | สูงสุด | หน่วย Rev. |
| V CC แรงดันไฟฟ้า | 7 | 40 | ใน |
| V I แรงดันไฟฟ้าที่อินพุตของเครื่องขยายเสียง | -0,3 | V CC - 2 | ใน |
| V O Collector แรงดันไฟฟ้า | 40 | ใน | |
| กระแสสะสม (ทรานซิสเตอร์แต่ละตัว) | 200 | mA | |
| ข้อเสนอแนะในปัจจุบัน | 0,3 | mA | |
| f ความถี่ OSC Oscillator | 1 | 300 | กิโลเฮิร์ตซ์ |
| C T ความจุของตัวเก็บประจุเครื่องกำเนิดไฟฟ้า | 0,47 | 10000 | nF |
| R T ความต้านทานตัวต้านทานกระแสสลับ | 1,8 | 500 | kOhm |
| T A อุณหภูมิในการทำงาน TL494C TL494I |
0 | 70 | ° C |
| -40 | 85 | ° C |
ลักษณะการ จำกัด มีดังนี้
แรงดันไฟฟ้า ................................................ ..... 41 บ
แรงดันอินพุตของเครื่องขยายเสียง .................................... (Vcc + 0.3) V
แรงดันขาออกของนักสะสม ................................ 41V
กระแสไฟขาออกของนักสะสม ............................................. 250mA
การกระจายพลังงานทั้งหมดในโหมดต่อเนื่อง .... 1W
ตำแหน่งและวัตถุประสงค์ของหมุดของวงจรไมโคร

สรุป 1
นี่ไม่ใช่อินพุตกลับด้าน (บวก) ของเครื่องขยายข้อผิดพลาด 1
หากแรงดันไฟฟ้าขาเข้าต่ำกว่าแรงดันไฟฟ้าที่ขา 2 ดังนั้นที่เอาต์พุตของเครื่องขยายเสียงนี้จะไม่มีข้อผิดพลาด 1 จะไม่มีแรงดันไฟฟ้า (เอาต์พุตจะมี ระดับต่ำ) และจะไม่มีผลใด ๆ กับความกว้าง (รอบหน้าที่) ของพัลส์เอาต์พุต
หากแรงดันไฟฟ้าที่พินนี้สูงกว่าที่พิน 2 จากนั้นที่เอาต์พุตของแอมพลิฟายเออร์นี้ 1 แรงดันไฟฟ้าจะปรากฏขึ้น (เอาต์พุตของแอมพลิฟายเออร์ 1 จะมีระดับสูง) และความกว้าง (รอบการทำงาน) ของพัลส์เอาท์พุตจะยิ่งลดลงยิ่งแรงดันเอาต์พุตของแอมป์นี้สูง (สูงสุด 3.3 โวลต์)
สรุป 2
นี่คืออินพุตกลับด้าน (ลบ) ของเครื่องขยายข้อผิดพลาด 1
หากแรงดันไฟฟ้าขาเข้าที่ขานี้สูงกว่าที่ขา 1 จะไม่มีข้อผิดพลาดแรงดันไฟฟ้าที่เอาต์พุตของเครื่องขยายเสียง (เอาต์พุตจะต่ำ) และจะไม่มีผลใด ๆ ต่อความกว้าง (รอบการทำงาน) ของพัลส์เอาต์พุต
หากแรงดันไฟฟ้าที่ขานี้ต่ำกว่าที่ขา 1 เอาต์พุตของเครื่องขยายเสียงจะสูง
แอมพลิฟายเออร์ข้อผิดพลาดคือออปแอมป์ธรรมดาที่มีอัตราขยาย \u003d 70..95 dB ที่แรงดันไฟฟ้าคงที่ (Ku \u003d 1 ที่ความถี่ 350 kHz) ช่วงแรงดันไฟฟ้าอินพุตของ op-amp ขยายจาก -0.3V ถึงแรงดันไฟฟ้าลบ 2V นั่นคือแรงดันไฟฟ้าขาเข้าสูงสุดจะต้องต่ำกว่าแรงดันไฟฟ้าอย่างน้อยสองโวลต์
สรุป 3
นี่คือเอาต์พุตของวงจรขยายข้อผิดพลาด 1 และ 2 ที่เชื่อมต่อกับพินนี้ผ่านไดโอด (วงจรหรือ) หากแรงดันไฟฟ้าที่เอาต์พุตของแอมพลิฟายเออร์ใด ๆ เปลี่ยนจากต่ำไปสูงดังนั้นที่พิน 3 ก็จะสูงเช่นกัน
หากแรงดันไฟฟ้าที่พินนี้เกิน 3.3 V พัลส์ที่เอาต์พุตของไมโครวงจรจะหายไป (รอบการทำงานเป็นศูนย์)
หากแรงดันไฟฟ้าที่ขานี้ใกล้เคียงกับ 0 V ระยะเวลาของพัลส์เอาท์พุต (รอบการทำงาน) จะสูงสุด
โดยปกติพิน 3 จะใช้เพื่อให้ข้อมูลย้อนกลับสำหรับแอมพลิฟายเออร์ แต่หากจำเป็นก็สามารถใช้พิน 3 เป็นอินพุตเพื่อเปลี่ยนความกว้างพัลส์ได้
หากแรงดันไฟฟ้าคร่อมสูง (\u003e ~ 3.5 V) จะไม่มีพัลส์ที่เอาต์พุต MS แหล่งจ่ายไฟจะไม่เริ่มทำงานภายใต้สถานการณ์ใด ๆ
สรุป 4
มันควบคุมช่วงของการแปรผันของเวลา "ตาย" (อังกฤษ Dead-Time Control) โดยหลักการแล้วนี่คือวัฏจักรหน้าที่เดียวกัน
หากแรงดันไฟฟ้าที่อยู่ใกล้กับ 0 V เอาต์พุตของไมโครวงจรจะเป็นทั้งความกว้างของพัลส์ต่ำสุดที่เป็นไปได้และสูงสุดซึ่งสามารถกำหนดได้ด้วยสัญญาณอินพุตอื่น ๆ (แอมพลิฟายเออร์ข้อผิดพลาดพิน 3)
หากแรงดันไฟฟ้าที่ขานี้อยู่ที่ประมาณ 1.5 V ความกว้างของพัลส์เอาต์พุตจะอยู่ที่ประมาณ 50% ของความกว้างสูงสุด
หากแรงดันไฟฟ้าที่ขานี้เกิน 3.3 V จะไม่มีพัลส์ที่เอาต์พุต MS แหล่งจ่ายไฟจะไม่เริ่มทำงานภายใต้สถานการณ์ใด ๆ
แต่อย่าลืมว่าเมื่อเวลา "ตาย" เพิ่มขึ้นช่วงการปรับ PWM จะลดลง
ด้วยการเปลี่ยนแรงดันไฟฟ้าที่พิน 4 คุณสามารถตั้งค่าความกว้างคงที่ของเวลา "ตาย" (ตัวแบ่ง R-R) ใช้โหมดซอฟต์สตาร์ทในแหล่งจ่ายไฟ (โซ่ R-C) ให้การปิด MS (คีย์) จากระยะไกลและคุณยังสามารถใช้พินนี้เป็นอินพุตควบคุมเชิงเส้นได้อีกด้วย
ลองพิจารณาดู (สำหรับคนที่ไม่รู้) ว่าเวลา "ตาย" คืออะไรและมีไว้เพื่ออะไร
เมื่อวงจรดัน - ดึงของแหล่งจ่ายไฟทำงานพัลส์จะถูกจ่ายสลับกันจากเอาต์พุตของวงจรไมโครไปยังฐาน (ประตู) ของทรานซิสเตอร์เอาต์พุต เนื่องจากทรานซิสเตอร์ใด ๆ เป็นองค์ประกอบเฉื่อยจึงไม่สามารถปิด (เปิด) ได้ทันทีเมื่อสัญญาณถูกลบ (นำไปใช้) จากฐาน (ประตู) ของทรานซิสเตอร์เอาต์พุต และหากใช้พัลส์กับทรานซิสเตอร์เอาท์พุตโดยไม่มีเวลา "ตาย" (นั่นคือถอดพัลส์ออกจากหนึ่งและนำไปใช้กับวินาทีทันที) อาจเกิดขึ้นสักครู่เมื่อทรานซิสเตอร์ตัวหนึ่งไม่มีเวลาปิดและตัวที่สองเปิดแล้ว จากนั้นกระแสทั้งหมด (เรียกว่ากระแส) จะไหลผ่านทรานซิสเตอร์แบบเปิดทั้งสองโดยผ่านโหลด (ขดลวดหม้อแปลง) และเนื่องจากจะไม่ถูก จำกัด ด้วยสิ่งใดเลยทรานซิสเตอร์เอาต์พุตจะล้มเหลวทันที
เพื่อป้องกันไม่ให้สิ่งนี้เกิดขึ้นจำเป็นหลังจากสิ้นสุดแรงกระตุ้นหนึ่งครั้งและก่อนที่จะเริ่มต่อไป - บางส่วน เวลาที่แน่นอนเพียงพอที่จะปิดทรานซิสเตอร์เอาต์พุตได้อย่างน่าเชื่อถือจากอินพุตที่สัญญาณควบคุมถูกลบออก
เวลานี้เรียกว่าเวลา "ตาย"
ใช่แม้ว่าคุณจะดูรูปที่มีองค์ประกอบของไมโครเซอร์กิตเราจะเห็นว่าพิน 4 เชื่อมต่อกับอินพุตของตัวเปรียบเทียบการปรับเวลาตาย (DA1) ผ่านแหล่งจ่ายแรงดัน 0.1-0.12 โวลต์เหตุใดจึงทำเช่นนี้
สิ่งนี้ทำได้อย่างแม่นยำเพื่อให้ความกว้างสูงสุด (รอบหน้าที่) ของพัลส์เอาท์พุตไม่เท่ากับ 100% เพื่อให้แน่ใจ ปลอดภัยในการทำงาน เอาท์พุท (เอาต์พุต) ทรานซิสเตอร์
นั่นคือถ้าคุณ "ใส่" พิน 4 บนลวดทั่วไปจะยังไม่มีแรงดันไฟฟ้าเป็นศูนย์ที่อินพุตของตัวเปรียบเทียบ DA1 แต่จะมีแรงดันไฟฟ้าเพียงค่านี้ (0.1-0.12 V) และพัลส์จากเครื่องกำเนิดแรงดันฟันเลื่อย (FPG) ปรากฏที่เอาต์พุตของไมโครวงจรเฉพาะเมื่อแอมพลิจูดที่พิน 5 เกินแรงดันไฟฟ้านี้ นั่นคือไมโครเซอร์กิตมีเกณฑ์สูงสุดคงที่สำหรับรอบการทำงานของพัลส์เอาท์พุตซึ่งจะไม่เกิน 95-96% สำหรับการทำงานรอบเดียวของสเตจเอาท์พุทและ 47.5-48% สำหรับการทำงานแบบผลักดึงของสเตจเอาต์พุต
สรุป 5
นี่คือเอาต์พุตของ GPN ซึ่งออกแบบมาเพื่อเชื่อมต่อตัวเก็บประจุเวลา Ct กับมันซึ่งปลายอีกด้านหนึ่งเชื่อมต่อกับสายไฟทั่วไป โดยปกติความจุจะถูกเลือกตั้งแต่ 0.01 μFถึง 0.1 μFขึ้นอยู่กับความถี่เอาต์พุตของพัลส์ GPN ของคอนโทรลเลอร์ PWM ตามกฎแล้วจะใช้ตัวเก็บประจุคุณภาพสูงที่นี่
ความถี่เอาต์พุตของ FPG สามารถควบคุมได้ที่พินนี้ การแกว่งของแรงดันไฟฟ้าขาออกของเครื่องกำเนิดไฟฟ้า (แอมพลิจูดของพัลส์เอาท์พุต) อยู่ที่ไหนสักแห่งในพื้นที่ 3 โวลต์
สรุป 6
นอกจากนี้เอาต์พุตของ GPN ซึ่งมีไว้สำหรับเชื่อมต่อกับตัวต้านทานการตั้งค่าเวลา Rt ซึ่งปลายอีกด้านหนึ่งเชื่อมต่อกับสายไฟทั่วไป
ค่า Rt และ Ct กำหนดความถี่เอาต์พุตของ FPG และคำนวณโดยสูตรสำหรับการดำเนินการรอบเดียว
สำหรับโหมดการทำงานสองจังหวะสูตรจะเป็นดังนี้
สำหรับตัวควบคุม PWM จาก บริษัท อื่นความถี่จะคำนวณโดยใช้สูตรเดียวกันยกเว้นว่าหมายเลข 1 จะต้องเปลี่ยนเป็น 1.1
สรุป 7
เชื่อมต่อกับสายไฟทั่วไปของวงจรอุปกรณ์บนตัวควบคุม PWM
สรุป 8
ไมโครวงจรประกอบด้วยสเตจเอาท์พุทที่มีทรานซิสเตอร์เอาต์พุตสองตัวซึ่งเป็นสวิตช์เอาต์พุต เอาท์พุตของตัวสะสมและตัวปล่อยของทรานซิสเตอร์เหล่านี้ไม่มีค่าใช้จ่ายดังนั้นจึงสามารถรวมทรานซิสเตอร์เหล่านี้ไว้ในวงจรเพื่อทำงานร่วมกับทั้งตัวปล่อยทั่วไปและตัวสะสมทั่วไปทั้งนี้ขึ้นอยู่กับความต้องการ
ขึ้นอยู่กับแรงดันไฟฟ้าที่ขา 13 ขั้นตอนการส่งออกนี้สามารถทำงานได้ทั้งในโหมดผลักดึงหรือแบบดึงครั้งเดียว ในการทำงานแบบ single-end ทรานซิสเตอร์เหล่านี้สามารถเชื่อมต่อแบบขนานเพื่อเพิ่มกระแสโหลดซึ่งโดยปกติจะทำ
ดังนั้นพิน 8 คือพินสะสมของทรานซิสเตอร์ 1
สรุป 9
นี่คือพินตัวปล่อยของทรานซิสเตอร์ 1
สรุป 10
นี่คือขาปล่อยของทรานซิสเตอร์ 2
สรุป 11
นี่คือตัวสะสมของทรานซิสเตอร์ 2
สรุป 12
พินนี้เชื่อมต่อขั้วบวกของแหล่งจ่ายไฟ TL494CN
สรุป 13
นี่คือพินสำหรับเลือกโหมดการทำงานของสเตจเอาต์พุต หากพินนี้เชื่อมต่อกับสายทั่วไปสเตจเอาต์พุตจะทำงานในโหมดปลายด้านเดียว สัญญาณเอาต์พุตที่ขั้วของสวิตช์ทรานซิสเตอร์จะเหมือนกัน
หากคุณใช้แรงดันไฟฟ้า +5 V กับพินนี้ (เชื่อมต่อพิน 13 และ 14) สวิตช์เอาต์พุตจะทำงานในโหมดดัน - ดึง สัญญาณเอาต์พุตที่ขั้วของสวิตช์ทรานซิสเตอร์จะอยู่ในแอนติเฟสและความถี่ของพัลส์เอาต์พุตจะน้อยลงสองเท่า
ข้อสรุป 14
นี่คือผลลัพธ์ของคอกม้า และแหล่งที่มา เกี่ยวกับโป๊ ซแรงดันไฟฟ้า (อ้างอิง) โดยมีแรงดันเอาต์พุต +5 V และกระแสเอาต์พุตสูงสุด 10 mA ซึ่งสามารถใช้เป็นข้อมูลอ้างอิงสำหรับการเปรียบเทียบในวงจรขยายข้อผิดพลาดและเพื่อวัตถุประสงค์อื่น ๆ
สรุป 15
มันทำงานในลักษณะเดียวกับพิน 2 หากไม่ได้ใช้แอมพลิฟายเออร์ข้อผิดพลาดที่สองพิน 15 จะเชื่อมต่อกับพิน 14 (อ้างอิง +5 V)
สรุป 16
มันทำงานในลักษณะเดียวกับพิน 1 หากไม่ได้ใช้แอมพลิฟายเออร์ข้อผิดพลาดที่สองก็มักจะเชื่อมต่อกับสายทั่วไป (พิน 7)
เมื่อขา 15 เชื่อมต่อกับ +5 V และขา 16 ที่เชื่อมต่อกับกราวด์แรงดันไฟฟ้าขาออกของแอมพลิฟายเออร์ตัวที่สองจะขาดดังนั้นจึงไม่มีผลต่อการทำงานของไมโครวงจร
หลักการทำงานของไมโครวงจร
คอนโทรลเลอร์ TL494 PWM ทำงานอย่างไร?
ด้านบนเราได้ตรวจสอบโดยละเอียดถึงจุดประสงค์ของหมุดของวงจรไมโครนี้และฟังก์ชันที่ใช้งานได้
หากวิเคราะห์ทั้งหมดนี้อย่างรอบคอบจากทั้งหมดนี้จะเห็นได้ชัดว่าไมโครวงจรนี้ทำงานอย่างไร แต่ฉันจะอธิบายสั้น ๆ อีกครั้งว่ามันทำงานอย่างไร
ด้วยการเปิดสวิตช์ microcircuit โดยทั่วไปและจ่ายพลังงานให้กับมัน (ลบไปที่พิน 7 บวกกับขา 12) GPN จะเริ่มสร้างพัลส์ฟันเลื่อยที่มีแอมพลิจูดประมาณ 3 โวลต์ความถี่ซึ่งขึ้นอยู่กับ C และ R ที่เชื่อมต่อกับพิน 5 และ 6 ของไมโครเซอร์กิต
หากค่าของสัญญาณควบคุม (ที่พิน 3 และ 4) น้อยกว่า 3 โวลต์พัลส์สี่เหลี่ยมจะปรากฏบนคีย์เอาท์พุตของไมโครเซอร์กิตความกว้างของ (รอบการทำงาน) จะขึ้นอยู่กับค่าของสัญญาณควบคุมที่พิน 3 และ 4
นั่นคือไมโครเซอร์กิตเปรียบเทียบแรงดันฟันเลื่อยบวกจากตัวเก็บประจุ Ct (C1) กับสัญญาณควบคุมใด ๆ จากสองสัญญาณ
วงจรลอจิกสำหรับควบคุมทรานซิสเตอร์เอาท์พุต VT1 และ VT2 จะเปิดเฉพาะเมื่อแรงดันไฟฟ้าของพัลส์ฟันเลื่อยสูงกว่าสัญญาณควบคุม และยิ่งความแตกต่างนี้มากเท่าใดพัลส์เอาต์พุตก็จะกว้างขึ้น (รอบการทำงานที่มากขึ้น)
แรงดันไฟฟ้าควบคุมที่ขา 3 ในทางกลับกันขึ้นอยู่กับสัญญาณที่อินพุตของแอมพลิฟายเออร์ที่ใช้งานได้ (แอมพลิฟายเออร์ข้อผิดพลาด) ซึ่งจะสามารถควบคุมแรงดันเอาต์พุตและกระแสเอาต์พุตของ PSU ได้
ดังนั้นการเพิ่มหรือลดค่าของสัญญาณควบคุมใด ๆ ตามลำดับทำให้เกิดการลดลงเชิงเส้นหรือการเพิ่มขึ้นของความกว้างของพัลส์แรงดันไฟฟ้าที่เอาต์พุตของไมโครวงจร
ดังที่กล่าวไว้ข้างต้นแรงดันไฟฟ้าจากพิน 4 (การควบคุมเวลาตาย) อินพุตของแอมพลิฟายเออร์ข้อผิดพลาดหรืออินพุตสัญญาณตอบรับโดยตรงจากพิน 3 สามารถใช้เป็นสัญญาณควบคุมได้
ทฤษฎีตามที่ทฤษฎีกล่าวไว้ แต่จะดีกว่ามากหากมองและ "รู้สึก" ทั้งหมดนี้ในทางปฏิบัติดังนั้นเรามารวบรวมวงจรต่อไปนี้บนเขียงหั่นขนมและดูด้วยตาของเราเองว่ามันทำงานอย่างไร

ง่ายที่สุดและ วิธีที่รวดเร็ว - รวบรวมทั้งหมดนี้บนเขียงหั่นขนม ใช่ฉันติดตั้งไมโครวงจร KA7500 ฉันใส่พิน "13" ของไมโครเซอร์กิตบนสายไฟทั่วไปนั่นคือปุ่มเอาต์พุตของเราจะทำงานในโหมดรอบเดียว (สัญญาณบนทรานซิสเตอร์จะเท่ากัน) และอัตราการทำซ้ำของพัลส์เอาต์พุตจะสอดคล้องกับความถี่ของแรงดันไฟฟ้าฟันเลื่อย GPN

ฉันเชื่อมต่อออสซิลโลสโคปกับจุดควบคุมต่อไปนี้:
- รังสีตัวแรกที่ตรึง "4" เพื่อควบคุมแรงดันไฟฟ้าคงที่ที่พินนี้ อยู่ตรงกลางหน้าจอบนเส้นศูนย์ ความไว - 1 โวลต์ต่อกอง
- รังสีที่สองเพื่อตรึง "5" เพื่อควบคุมแรงดันฟันเลื่อยของ FPG นอกจากนี้ยังตั้งอยู่บนเส้นศูนย์ (คานทั้งสองอยู่ในแนวเดียวกัน) ตรงกลางออสซิลโลสโคปและมีความไวเท่ากัน
- รังสีที่สามไปยังเอาต์พุตของไมโครเซอร์กิตเพื่อตรึง "9" เพื่อควบคุมพัลส์ที่เอาต์พุตของไมโครเซอร์กิต ความไวของลำแสง 5 โวลต์ต่อการแบ่ง (0.5 โวลต์บวกตัวแบ่งด้วย 10) อยู่ที่ด้านล่างของหน้าจอออสซิลโลสโคป

ฉันลืมบอกไปว่าปุ่มเอาต์พุตของไมโครวงจรนั้นเชื่อมต่อกับตัวสะสมทั่วไป กล่าวอีกนัยหนึ่ง - ตามโครงการผู้ติดตามตัวปล่อย ทำไมต้องทวน? เนื่องจากสัญญาณที่ตัวปล่อยของทรานซิสเตอร์จะทำซ้ำสัญญาณของฐานเพื่อให้เราสามารถมองเห็นทุกอย่างได้อย่างชัดเจน
หากคุณรับสัญญาณจากตัวเก็บรวบรวมของทรานซิสเตอร์มันจะกลับหัว (กลับหัว) ตามสัญญาณฐาน
เราจ่ายไฟให้กับไมโครวงจรและดูว่าเรามีอะไรในเอาต์พุต
ที่ขาที่สี่เรามีศูนย์ (ตัวเลื่อนทริมเมอร์อยู่ในตำแหน่งต่ำสุด) เรย์แรกอยู่ที่เส้นศูนย์ตรงกลางหน้าจอ วงจรขยายข้อผิดพลาดไม่ทำงานเช่นกัน
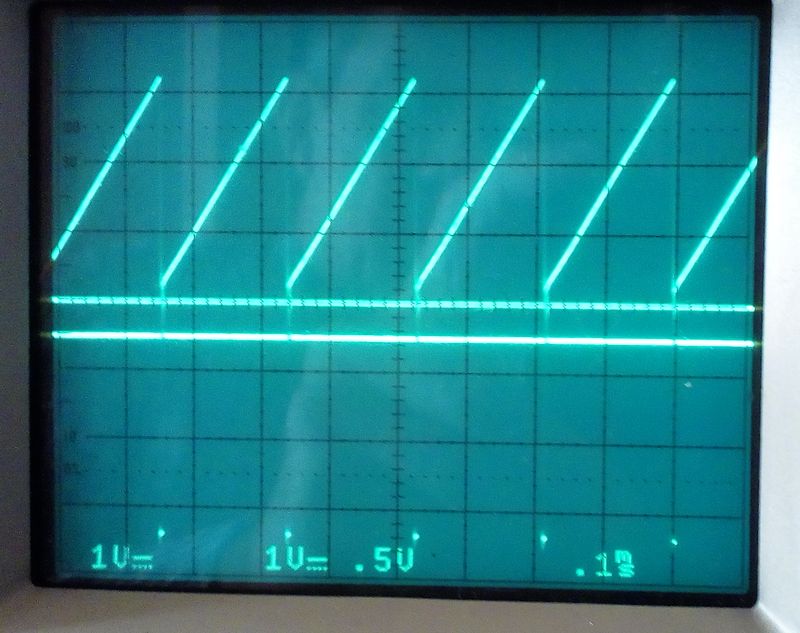
ที่ขาที่ห้าเราเห็นแรงดันฟันเลื่อยของ GPN (ลำแสงที่สอง) โดยมีแอมพลิจูดมากกว่า 3 โวลต์เล็กน้อย
ที่เอาต์พุตของไมโครเซอร์กิต (พิน 9) เราจะเห็นพัลส์สี่เหลี่ยมที่มีแอมพลิจูดประมาณ 15 โวลต์และความกว้างสูงสุด (96%) จุดที่ด้านล่างของหน้าจอตรงกับเกณฑ์รอบการทำงานคงที่ เพื่อให้มองเห็นได้ง่ายขึ้นให้เปิดการยืดบนออสซิลโลสโคป

ตอนนี้คุณสามารถมองเห็นได้ดีขึ้น นี่คือเวลาตรงที่แอมพลิจูดของพัลส์ลดลงเป็นศูนย์และทรานซิสเตอร์เอาต์พุตปิด เวลาอันสั้น... ระดับศูนย์สำหรับลำแสงนี้อยู่ที่ด้านล่างของหน้าจอ
ทีนี้ลองเพิ่มแรงดันไฟฟ้าให้กับขา "4" แล้วดูว่าเราได้อะไร

ที่พิน "4" พร้อมตัวต้านทานการตัดแต่งฉันตั้งค่าแรงดันคงที่ 1 โวลต์ลำแสงแรกเพิ่มขึ้นหนึ่งส่วน (เส้นตรงบนหน้าจอออสซิลโลสโคป) เราเห็นอะไร? เวลาตายเพิ่มขึ้น (รอบการทำงานลดลง) นี่คือเส้นประที่ด้านล่างของหน้าจอ นั่นคือทรานซิสเตอร์เอาท์พุทจะปิดเป็นเวลาแล้วประมาณครึ่งหนึ่งของระยะเวลาของพัลส์เอง
เพิ่มอีกหนึ่งโวลต์ด้วยทริมเมอร์เพื่อตรึง "4" ของไมโครเซอร์กิต

เราจะเห็นว่าเรย์แรกเพิ่มขึ้นอีกส่วนหนึ่งระยะเวลาของพัลส์เอาท์พุตก็สั้นลง (1/3 ของระยะเวลาของพัลส์ทั้งหมด) และเวลาตาย (เวลาปิดของทรานซิสเตอร์เอาต์พุต) เพิ่มขึ้นเป็นสองในสาม นั่นคือจะเห็นได้อย่างชัดเจนว่าตรรกะของไมโครเซอร์กิตเปรียบเทียบระดับของสัญญาณ FPG กับระดับของสัญญาณควบคุมและส่งผ่านไปยังเอาต์พุตเฉพาะสัญญาณ FPG ซึ่งเป็นระดับที่สูงกว่าสัญญาณควบคุม
เพื่อให้ชัดเจนยิ่งขึ้นระยะเวลา (ความกว้าง) ของพัลส์เอาท์พุตของไมโครวงจรจะเหมือนกับระยะเวลา (ความกว้าง) ของพัลส์เอาท์พุตของแรงดันฟันเลื่อยที่อยู่เหนือระดับของสัญญาณควบคุม (เหนือเส้นตรงบนหน้าจอออสซิลโลสโคป)

ไปข้างหน้าเพิ่มอีกหนึ่งโวลต์เพื่อตรึง "4" ของไมโครวงจร เราเห็นอะไร? ที่เอาต์พุตของไมโครเซอร์กิตพัลส์ที่สั้นมากจะมีความกว้างใกล้เคียงกับที่ยื่นออกมาเหนือเส้นตรงของด้านบนของแรงดันฟันเลื่อย มาเปิดการยืดบนออสซิลโลสโคปเพื่อให้เห็นชีพจรได้ดีขึ้น

ที่นี่เราจะเห็นพัลส์สั้น ๆ ในระหว่างที่ทรานซิสเตอร์เอาต์พุตจะเปิดและเวลาที่เหลือ (บรรทัดล่างสุดของหน้าจอ) จะปิดลง
ทีนี้ลองเพิ่มแรงดันไฟฟ้าที่ขา "4" ให้มากขึ้น เราตั้งค่าแรงดันไฟฟ้าที่เอาต์พุตด้วยตัวต้านทานการตัดแต่งเหนือระดับแรงดันฟันเลื่อยของ GPN

นั่นแหล่ะหน่วยจ่ายไฟจะหยุดทำงานให้เราเนื่องจากเอาต์พุตสงบสนิท ไม่มีพัลส์เอาต์พุตเนื่องจากที่พินควบคุม "4" เรามีแรงดันไฟฟ้าคงที่มากกว่า 3.3 โวลต์
สิ่งเดียวกันนี้จะเกิดขึ้นหากคุณใช้สัญญาณควบคุมเพื่อตรึง "3" หรือกับเครื่องขยายสัญญาณข้อผิดพลาดใด ๆ สำหรับทุกคนที่สนใจคุณสามารถตรวจสอบได้ด้วยตนเองในเชิงประจักษ์ ยิ่งไปกว่านั้นหากสัญญาณควบคุมอยู่บนพินควบคุมทั้งหมดทันทีไมโครเซอร์กิตจะควบคุม (เหนือกว่า) จะมีสัญญาณจากพินควบคุมนั้นซึ่งแอมพลิจูดจะมากกว่า
เรามาลองถอดพิน "13" ออกจากสายทั่วไปแล้วเชื่อมต่อกับพิน "14" นั่นคือเปลี่ยนโหมดการทำงานของคีย์เอาต์พุตจากรอบเดียวเป็นแบบกด - ดึง มาดูกันว่าเราได้อะไร

โดยใช้ทริมเมอร์ทำให้แรงดันไฟฟ้าที่ขา "4" เป็นศูนย์อีกครั้ง เราเปิดเครื่อง เราเห็นอะไร?
ที่เอาต์พุตของไมโครเซอร์กิตยังมีพัลส์สี่เหลี่ยมของระยะเวลาสูงสุด แต่อัตราการทำซ้ำของพวกมันกลายเป็นครึ่งหนึ่งของความถี่ของพัลส์ฟันเลื่อย
พัลส์เดียวกันจะอยู่บนทรานซิสเตอร์คีย์ตัวที่สองของไมโครเซอร์กิต (พิน 10) โดยมีความแตกต่างเพียงอย่างเดียวที่จะถูกเลื่อนไปตามเวลาเมื่อเทียบกับ 180 องศา
นอกจากนี้ยังมีเกณฑ์รอบการทำงานสูงสุด (2%) ตอนนี้มองไม่เห็นคุณต้องเชื่อมต่อลำแสงที่ 4 ของออสซิลโลสโคปและรวมสัญญาณเอาต์พุตทั้งสองเข้าด้วยกัน หัววัดที่สี่ไม่ได้อยู่ในมือฉันจึงไม่ได้ทำ ใครอยากได้ลองตรวจสอบด้วยตัวเองเพื่อความแน่ใจ
ในโหมดนี้ไมโครเซอร์กิตทำงานในลักษณะเดียวกับในโหมดรอบเดียวโดยมีข้อแตกต่างเพียงประการเดียวคือระยะเวลาสูงสุดของพัลส์เอาต์พุตที่นี่จะไม่เกิน 48% ของระยะเวลาพัลส์ทั้งหมด
ดังนั้นเราจะไม่พิจารณาโหมดนี้เป็นเวลานาน แต่ดูว่าเราจะมีแรงกระตุ้นอะไรเมื่อแรงดันไฟฟ้าที่ขา "4" เป็นสองโวลต์

เราเพิ่มแรงดันไฟฟ้าด้วยตัวต้านทานการตัดแต่ง ความกว้างของพัลส์เอาท์พุตลดลงเหลือ 1/6 ของระยะเวลาพัลส์ทั้งหมดนั่นคือมันยังมากกว่าสองเท่าในโหมดรอบเดียวของการทำงานของสวิตช์เอาท์พุต (มี 1/3 เท่า)
ที่เอาท์พุทของทรานซิสเตอร์ตัวที่สอง (พิน 10) จะมีพัลส์เดียวกันเลื่อนเวลาไป 180 องศาเท่านั้น
โดยหลักการแล้วเราได้วิเคราะห์การทำงานของตัวควบคุม PWM
เพิ่มเติมเกี่ยวกับข้อสรุป "4" ดังที่ได้กล่าวไว้ก่อนหน้านี้คุณสามารถใช้พินนี้เพื่อสตาร์ทแหล่งจ่ายไฟได้อย่างนุ่มนวล วิธีการจัดระเบียบนี้?
ง่ายมาก. ในการดำเนินการนี้ให้เชื่อมต่อโซ่ RC เพื่อตรึง "4" ตัวอย่างเช่นนี่คือส่วนของแผนภาพ:

soft start ทำงานอย่างไรที่นี่? เรามาดูแผนภาพ ตัวเก็บประจุ C1 ผ่านตัวต้านทาน R5 เชื่อมต่อกับ ION (+5 โวลต์)
เมื่อจ่ายไฟให้กับไมโครเซอร์กิต (พิน 12) +5 โวลต์จะปรากฏที่ขา 14 Capacitor C1 เริ่มชาร์จ กระแสชาร์จของตัวเก็บประจุจะไหลผ่านตัวต้านทาน R5 ในขณะที่เปิดสวิตช์สูงสุด (ตัวเก็บประจุจะถูกปล่อยออก) และแรงดันไฟฟ้าตกที่ 5 โวลต์จะเกิดขึ้นที่ตัวต้านทานซึ่งป้อนให้กับพิน "4" แรงดันไฟฟ้านี้ตามที่เราได้ค้นพบในเชิงประจักษ์แล้วว่าห้ามไม่ให้ส่งพัลส์ไปยังเอาต์พุตของไมโครวงจร
เมื่อตัวเก็บประจุชาร์จกระแสไฟฟ้าจะลดลงและด้วยเหตุนี้แรงดันไฟฟ้าที่ตกคร่อมตัวต้านทานจะลดลง แรงดันไฟฟ้าที่ขา "4" จะลดลงเช่นกันและพัลส์จะเริ่มปรากฏที่เอาต์พุตของไมโครวงจรซึ่งระยะเวลาจะค่อยๆเพิ่มขึ้น (เนื่องจากประจุของตัวเก็บประจุ) เมื่อตัวเก็บประจุถูกชาร์จจนเต็มกระแสการชาร์จจะหยุดลงแรงดันไฟฟ้าที่ขา "4" จะใกล้เคียงกับศูนย์และขา "4" จะไม่ส่งผลต่อระยะเวลาของพัลส์เอาต์พุตอีกต่อไป แหล่งจ่ายไฟเข้าสู่โหมดการทำงาน
โดยปกติคุณเดาได้ว่าเวลาเริ่มต้นของหน่วยจ่ายไฟ (การเข้าสู่โหมดการทำงาน) จะขึ้นอยู่กับขนาดของตัวต้านทานและตัวเก็บประจุและจากการเลือกของพวกเขามันจะเป็นไปได้ที่จะควบคุมเวลานี้
นี่เป็นบทสรุปสั้น ๆ ของทฤษฎีและการปฏิบัติทั้งหมดและไม่มีอะไรซับซ้อนเป็นพิเศษที่นี่และถ้าคุณเข้าใจและเข้าใจการทำงานของ PWM นี้คุณจะเข้าใจและเข้าใจการทำงานของ PWM อื่น ๆ ได้ไม่ยาก
ขอให้ทุกคนโชคดี