A.V පදනම මත ලිපිය සකස් කර ඇත.
KERUYUCHA MICROSCHEM TL494
අද DBZH හි, තද ට්රාන්සිස්ටරවල keruyuchy remikannya ක වෝල්ටීයතාවයක් සෑදීම සඳහා, ශබ්දය විශේෂ ඒකාබද්ධ ක්ෂුද්ර පරිපථ (ICCs) වලින් සාදා ඇත.
WIM ප්රකාරයේදී DBZH හි සාමාන්ය ක්රියාකාරිත්වය සහතික කිරීම සඳහා කදිම IMC වන්නේ මනස පහත් කිරීම ගැන වැඩි තෘප්තියක් ලැබීමයි:
වැඩ කරන වෝල්ටීයතාවය 40V ට වඩා වැඩි නොවේ;
ඉතා ස්ථායී තාප ස්ථායී සමුද්දේශ වෝල්ටීයතා ප්ලග් එකක් තිබීම;
කියත් ආකාරයේ වෝල්ටීයතා උත්පාදකයක් තිබීම
වැඩසටහන්ගත මෘදු ආරම්භයක ශබ්ද සංඥාවක් සමඟ සමමුහුර්ත කිරීමේ හැකියාව සහතික කිරීම;
ඉහළ පොදු මාදිලියේ වෝල්ටීයතාවයක් සහිත අකාර්යක්ෂමතාවයේ සංඥාවක් තිබීම;
PWM සංසන්දනකය සිටීම;
ස්පන්දන සෙරමික් ප්රේරකයක් තිබීම;
කෙටි පරිපථයක පිටතට ගලා යාමෙන් නාලිකා දෙකක ඉදිරිපස කෙළවරේ කඳුරැල්ලක් තිබීම;
යැපෙන ආවේගයේ ගෙල සිරකිරීමේ තර්කයේ පැවැත්ම;
ප්රතිදාන වෝල්ටීයතාවයේ සමමිතිය නිවැරදි කිරීමේ මාධ්යයන් තිබීම;
ස්ට්රම් හුවමාරුව පුළුල් පරාසයක අවධි වෝල්ටීයතාවයක පැවතීම මෙන්ම හදිසි ප්රකාරයේදී මාරු වීමත් සමඟ සම කාලය තුළ ස්ට්රම් හුවමාරුව;
සෘජු සම්ප්රේෂණය සමඟ ස්වයංක්රීය සම්ප්රේෂණය පැවතීම;
ජීවිතයේ වෝල්ටීයතාවය අඩු වන විට ආරක්ෂිතව මාරු කිරීම;
අධික වෙහෙසකින් zahistu ආරක්ෂාව;
summ_snostі iz TTL/CMOS තර්කයේ ආරක්ෂාව;
දුරස්ථ ස්විචය සක්රිය සහ අක්රිය කිරීමේ ආරක්ෂාව.
Malyunok 11. Control chip TL494 සහ її pinout.
DBZh පන්තිය සඳහා පාලන පරිපථයක් ලෙස, TEXAS INSTRUMENT (USA) (රූපය 11) විසින් නිෂ්පාදනය කරන ලද TL494CN වර්ගයේ ක්ෂුද්ර පරිපථය වඩාත් වැදගත් බව පෙනේ. එය ලැයිස්තුගත කර ඇති අනෙකුත් කාර්යයන් ක්රියාත්මක කරන අතර විදේශීය සමාගම් වෙනුවෙන් විවිධ නම් යටතේ නිකුත් කරනු ලැබේ. උදාහරණයක් ලෙස, SHARP සමාගම (ජපානය) IR3M02 චිපය, FAIRCHILD සමාගම (USA) - UA494, SAMSUNG සමාගම (කොරියාව) - KA7500, FUJITSU සමාගම (ජපානය) - MB3759 සහ යනාදිය නිෂ්පාදනය කරයි. Usі ts_ microcircuits є povnimi analogues vіtchiznyanoї microcircuit KR1114EU4. අපි වාර්තාව දෙස බලා එය මයික්රොචිප් ආධාරයෙන් රොබෝට අමුණමු. DBZh හි බල ඒකකය පාලනය කිරීම සඳහා සහ එහි ගබඩාවේ පළිගැනීම සඳහා වෝනා විශේෂයෙන් බෙදී ඇත (රූපය 12):
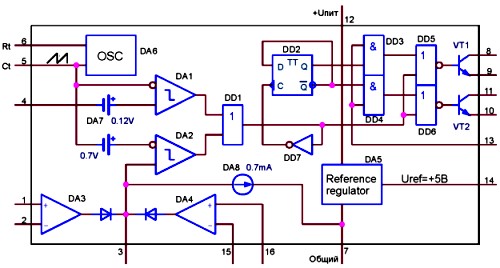
Malyunok 12. ІМС TL494 හි ක්රියාකාරී රූප සටහන
උත්පාදක කියත් වැනි වෝල්ටීයතාව DA6; DPN හි සංඛ්යාතය තීරණය කරනු ලබන්නේ 5 වන සහ 6 වන හැරීම් වලට සම්බන්ධ වන ප්රතිරෝධක සහ ධාරිත්රකයේ අගයන් මගිනි, සහ බල සැපයුම් පන්තියේදී, එය දළ වශයෙන් 60 kHz ට සමාන ලෙස තෝරා ගනු ලැබේ;
dzherelo යොමු ස්ථාවර වෝල්ටීයතා DA5 (Uref=+5,OB) පිටත ප්රතිදානය (visnovok 14);
සංසන්දනාත්මක "මළ කලාපය" DA1;
PWM comparator DA2;
DA3 වික්රියාව සඳහා pіdsilyuvach සමාව;
pіdsilyuvach සමාව සංඥා zamezhennya strumu DA4;
විවෘත එකතුකරන්නන් සහ විමෝචක සහිත ප්රතිදාන ට්රාන්සිස්ටර දෙකක් VT1 සහ VT2;
2 - DD2 මගින් rozpodіlu සංඛ්යාතයේ මාදිලියේ ගතික ද්වි-පහර D-ප්රේරකය;
අතිරේක තාර්කික මූලද්රව්ය DD1 (2-ABO), DD3 (2nd), DD4 (2nd), DD5 (2-ABO-NOT), DD6 (2-ABO-NOT), DD7 (NOT);
0.1BDA7 නාමික අගයක් සහිත dzherelo නියත වෝල්ටීයතාවය;
0.7 mA DA8 නාමික අගයක් සහිත dzherelo stoyny strumu.
ආරම්භක පාලන යෝජනා ක්රමය, පසුව. 8 සහ 11 වංගු මත, එම උච්චාවචනය තුළ ආවේග අනුපිළිවෙලවල් ඇත, එතීෙම් 12 වැනි, ජීවයේ වෝල්ටීයතාවය ලබා දෙන්නේ නම්, එහි මට්ටම +7 සිට +40 V දක්වා පරාසයක පවතී. සම්පූර්ණ ක්රියාකාරී ඒකක ගණන TL49 ගබඩාවට ඇතුළු වන විට, ඔබට එය මානසිකව ඩිජිටල් සහ ඇනලොග් කොටස් (ඩිජිටල් සහ ඇනලොග් සංඥා මාර්ග) වලට බෙදිය හැකිය. ඇනලොග් කොටසට පෙර, බල ස්විචයන් DA3, DA4, සංසන්දක DA1, DA2, කියත් වැනි වෝල්ටීයතා උත්පාදක DA6, මෙන්ම අතිරේක ප්ලග් DA5, DA7, DA8 ඇත. Usі іnshі elementi, zokrema මම vihіdnі ට්රාන්සිස්ටර, utvoryuyut ඩිජිටල් කොටසක් (ඩිජිටල් මාර්ගය).
රූපය 13. නාමික මාදිලියේ රොබෝ ІС TL494: U3, U4, U5 - ඉළ ඇට 3, 4, 5 මත වෝල්ටීයතා.
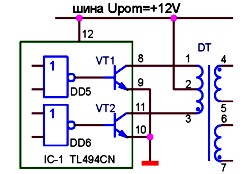
රොබෝවරයාගේ ඩිජිටල් මාවතේ පිටුපස දෙස බලමු. ක්ෂුද්ර පරිපථයේ ක්රියාකාරිත්වය පැහැදිලි කරන කාලසටහන් රූපසටහන් රූපයේ දැක්වේ. 13. කාලසටහන් රූප සටහන් වලින්, ක්ෂුද්ර පරිපථවල ප්රතිදාන ස්පන්දනවල අවස්ථා සහ පෙනුම මෙන්ම ඒවායේ ත්රිත්ව (රූප සටහන් 12 සහ 13) තාර්කික මූලද්රව්ය DD1 (රූප සටහන 5) ප්රතිදානයට පවරා ඇති බව දැක ගත හැකිය. Reshta "ලොජික්" vykonu පමණක් නාලිකා දෙකක් මත ප්රතිදාන ආවේගයන් DD1 අනුබෙදීමේ කාර්යය අතිරේක. ක්ෂුද්ර පරිපථයේ ප්රතිදාන ස්පන්දනවල ත්රිත්වය තීරණය වන්නේ ප්රතිදාන ට්රාන්සිස්ටර VT1, VT2 වල ප්රතිදානයේ ත්රිත්වතාවයෙනි. ඉතින්, ට්රාන්සිස්ටර දෙකක් එකතු කරන්නන් සහ විමෝචක සමඟ සම්බන්ධ කළ හැකි නම්, ඒවා සම්බන්ධ කිරීමට හැකි වේ. ප්රධාන විමෝචකයෙන් පරිපථයට පිටුපසින් ක්රියාත්මක කළ විට, ප්රතිදාන ස්පන්දන ට්රාන්සිස්ටරවල (8 සහ 11 ක්ෂුද්ර පරිපථ වලින්) පිටත එකතු කිරීමේ වෝල්ටීයතාවයෙන් ලබා ගන්නා අතර, ස්පන්දන විකි මගින් ධනාත්මක දිශාවට (ප්රමුඛතම) යොමු කරනු ලැබේ. ආවේගවල දාර සෘණ වේ). ට්රාන්සිස්ටරවල විමෝචක (වයර් 9 සහ 10 ක්ෂුද්ර පරිපථ) විවිධ කාලවලදී, ශබ්දය, පදනම් වේ. උණුසුම් එකතු කරන්නකු සමඟ පරිපථය පිටුපස මාරු වූ විට, ඇමතුම් ට්රාන්සිස්ටර සහ ප්රතිදාන ස්පන්දන විමෝචකවලට සම්බන්ධ කර, ස්පන්දන ඉහළට (ඉදිරිපස ඉදිරිපස සහ ධනාත්මක ස්පන්දන) මගින් නිවැරදි දිශාවට කෙළින් කර ඇති අතර ඒවා ට්රාන්සිස්ටර VT1 විමෝචක සමඟ සම්බන්ධ වේ. , VT2. මෙම ට්රාන්සිස්ටරවල එකතුකරන්නන් මයික්රොචිප් ලයිෆ් බසයට (උපොම්) සම්බන්ධ කර ඇත.
TL494 ක්ෂුද්ර පරිපථයේ ඩිජිටල් කොටසෙහි ගබඩාවට ඇතුළු වන අනෙකුත් ක්රියාකාරී නෝඩ් වල ප්රතිදාන ස්පන්දන, ක්ෂුද්ර පරිපථයේ පරිපථයෙන් ස්වාධීනව ඉහළට විකි මගින් සෘජුවම සම්බන්ධ වේ.
ප්රේරක DD2 යනු ද්වි-පහර ගතික D-ප්රේරකයකි. යෝගයේ මූලධර්මය ආක්රමණශීලී වේ. DD1 මූලද්රව්යයේ ප්රතිදාන ස්පන්දනයේ ප්රමුඛ (ධනාත්මක) ඉදිරිපස, ප්රේරක DD2 හි ආදානය D අභ්යන්තර ලේඛනයට ලියා ඇත. භෞතිකව, එයින් අදහස් කරන්නේ ප්රේරක දෙකෙන් පළමුවැන්න මාරු වී ඇති අතර එය ගබඩාව DD2 වෙත ඇතුළු වන බවයි. DD1 මූලද්රව්යයේ ප්රතිදානයේ ස්පන්දනය අවසන් වන්නේ නම්, එම ස්පන්දනයේ පසුපස (සෘණ) දාරය DD2 ගබඩාවේ වෙනත් ප්රේරකයක් මඟින් මාරු කරනු ලැබේ, සහ DD2 ප්රතිදානය වෙනස් වේ (ප්රතිදානය Q මත, තොරතුරු ආදානය D වෙතින් කියවනු ලැබේ). මෙය එක් කාල පරිච්ඡේදයක් සඳහා සමේ ට්රාන්සිස්ටර VT1, VT2 පදනම මත ස්පන්දනය තුළ පෙනී සිටීමේ හැකියාව ඇතුළත් වේ. ඇත්ත වශයෙන්ම, ප්රේරක DD2 ආදානයේ ස්පන්දනය වෙනස් නොවන තාක්, ප්රතිදානය වෙනස් නොවේ. එමනිසා, ආවේගය එක් නාලිකාවක් මගින් ක්ෂුද්ර පරිපථයේ ප්රතිදානය වෙත සම්ප්රේෂණය වේ, උදාහරණයක් ලෙස, ඉහළ එක (DD3, DD5, VT1). ආදානයේ ස්පන්දනය අවසන් වුවහොත්, DD2 flip-flop ස්විචය, ඉහළ සහ පහළ නාලිකාව අගුළු දමයි (DD4, DD6, VT2). එතකොට තමයි input එකට යන්න ආවේගය ඇවිත් DD5, DD6 කියන inputs පහල channel එක හරහා microcircuit එකේ output එකට සම්ප්රේෂණය වෙන්නේ. මේ ආකාරයට, එහි සෘණ දාරය peremikaє සමග DD1 මූලද්රව්යයේ පිටතට යන ආවේගවල සම DD2 අවුලුවාලීම සහ cym අත්තිකාරම් ආවේගයේ නාලිකාව වෙනස් කරයි. එසේම, ක්ෂුද්ර පරිපථයේ අවසාන ද්රව්යයේ, ක්ෂුද්ර පරිපථයේ ගෘහ නිර්මාණ ශිල්පය පාවෙන ආවේගය, ටොබ්ටෝ මර්දනය කිරීම සහතික කරන බව පෙන්නුම් කරයි. කාල සීමාව සඳහා එකම ට්රාන්සිස්ටරයක පදනම මත ස්පන්දන දෙකක පෙනුම නිවා දමයි.
ක්ෂුද්ර පරිපථයේ රොබෝ ඩිජිටල් පථයේ කාල පරිච්ඡේදය පිළිබඳ වාර්තාව දෙස බලමු.
ඉහළ (VT1) සහ පහළ (VT2) නාලිකාවේ ප්රතිදාන ට්රාන්සිස්ටරය සක්රිය කිරීමත් සමඟ අගුළු හැරීමේ ආවේගයක පෙනුම තීරණය වන්නේ රොබෝ මූලද්රව්ය DD5, DD6 ("2ABO-NOT") සහ මූලද්රව්යවල තත්ත්වය අනුව ය. DD3, DD4 ("2-І"), එය මෙන්, එහිම රේඛා ප්රේරක මෝල DD2.
2-ABO-NOT මූලද්රව්යයේ තර්කනය, පෙනෙන පරිදි, එවැනි මූලද්රව්යයක ප්රතිදානයේදී අධි වෝල්ටීයතාවයක වෝල්ටීයතාවයක් (තාර්කික 1) ඇති අතර එහි ඇති පරිදි පහත වැටීමකට වඩා වැඩි ප්රමාණයක් ඇත. ආදාන දෙකෙහිම අඩු වෝල්ටීයතා වේ (තාර්කික 0) . ආදාන සංඥා වල වෙනත් හැකි සංයෝජනයන් සමඟ, ABO මූලද්රව්ය 2 හි ප්රතිදානයේ අඩු වෝල්ටීයතා මට්ටමක් නොමැත (ලොජික් 0). එබැවින්, flip-flop DD2 є තාර්කික 1 හි ප්රතිදානයේදී Q (රූපය 13 හි රූප සටහන් 5 හි මොහොත ti), සහ ප්රතිදානයේදී / Q - තාර්කික 0, ඉන්පසු DD3 (2I) තාර්කික 1 යන මූලද්රව්යයේ යෙදවුම් දෙකෙහිම і දිස්වේ, එවිට, DD3 හි ප්රතිදානය මත තාර්කික 1 දිස් වේ, එබැවින් ඉහළ නාලිකාවේ DD5 මූලද්රව්යයේ (2ABO-NOT) එක් ආදානයක් මත දිස්වේ. පසුව, DD1 මූලද්රව්යයේ ප්රතිදානයෙන් මූලද්රව්යයේ වෙනත් ආදානයකට යා යුතු සංඥාව කුමක් වුවත්, DD5 හි ප්රතිදානය තාර්කික වන අතර ට්රාන්සිස්ටර VT1 සංවෘත තත්වයේ නැති වී යයි. DD4 මූලද්රව්යයේ ප්රතිදානය තාර්කික 0 වනු ඇත, මන්ද DD2 ප්රේරකයේ ප්රතිදානය /Q සඳහා සුදුසු DD4 හි එක් ආදානයක තාර්කික 0 පවතී. DD4 මූලද්රව්යයේ ප්රතිදානයේ තාර්කික ශුන්යය DD6 මූලද්රව්යයේ එක් ආදානයක් මත පිහිටා ඇති අතර එමඟින් පහළ නාලිකාව හරහා ස්පන්දනය ගමන් කිරීම සහතික කරයි. මෙම ධනාත්මක ධ්රැවීයතාවේ (තාර්කික 1) ආවේගය DD6 ප්රතිදානයේ දිස්වන අතර එම නිසා VT2 පදනම මත DD1 මූලද්රව්යයේ ප්රතිදාන ආවේග අතර පැයක විරාමයක් (tobto පැයකට, ප්රතිදානය DD1 මත නම් එය තාර්කික 0 - අන්තරය trt2 රූප සටහන 5 රූපය 13) . එබැවින්, VT2 ට්රාන්සිස්ටරය ක්රියාත්මක වන අතර දෙවන එකතු කරන්නා ධනාත්මක මට්ටමක් ලෙස ස්පන්දනය වේ (එය දීප්තිමත් විමෝචකයෙන් පරිපථයට සම්බන්ධ වන අවස්ථාවේදී).
DD1 මූලද්රව්යයේ ආක්රමණශීලී ප්රතිදාන ආවේගයේ කණ (මොහොත t2 රූප සටහන 5 රූපය 13) ඩීඩී 6 මූලද්රව්යයේ ක්රිම් වන ක්ෂුද්ර පරිපථයේ ඩිජිටල් මාර්ගයේ මූලද්රව්ය වෙනස් නොකරනු ඇත, එහි ප්රතිදානයේදී තාර්කික 0 දිස්වනු ඇත. , සහ ට්රාන්සිස්ටරය VT2 වසා දමනු ඇත. ප්රතිදාන ස්පන්දනය සම්පූර්ණ කිරීම DD1 (moment ta) දිග ප්රේරක DD2 ප්රතිදානය විශාලනය කරයි (තර්කය 0 - ප්රතිදානය Q මත, තාර්කික 1 - ප්රතිදානය / Q මත). එබැවින්, DD3, DD4 මූලද්රව්යවල ප්රතිදානයන් වෙනස් වනු ඇත (ප්රතිදානය DD3 - තාර්කික 0, ප්රතිදානය මත DD4 - තාර්කික 1). මේ මොහොතේ ආරම්භ වූ විරාමයක්! DD3 මූලද්රව්යයේ ප්රතිදානය මත තාර්කික 0 හැකියාව "තහවුරු කරන්න", ට්රාන්සිස්ටර VT1 පදනම මත එය පිඹින ස්පන්දනයක සැබෑ පෙනුම බවට පරිවර්තනය කරයි. මෙම ආවේගය U මොහොත දක්වා පවතින අතර ඉන් පසුව VT1 වසා දමා ක්රියාවලි නැවත සිදු වේ.
මේ ආකාරයෙන්, ක්ෂුද්ර පරිපථයේ ඩිජිටල් මාවතේ ක්රියාකාරිත්වය පිළිබඳ ප්රධාන අදහස පදනම් වී ඇත්තේ 8 සහ 11 දඟර මත (හෝ 9 සහ 10 දඟර මත) පිටතට යන ස්පන්දනයේ ත්රිත්වය තීරණය වන්නේ DD1 මූලද්රව්යයේ පිටතට යන ආවේග අතර විරාමයේ සුළු බව. DD3, DD4 මූලද්රව්ය මගින් ආවේගයක් සංඥාවක් හරහා ගමන් කිරීම සඳහා නාලිකාව නම් කරයි අඩු මට්ටම, DD1 මූලද්රව්යය මගින් සුව කරන ප්රේරක DD2 හි Q සහ / Q ප්රතිදානයන් මත ඇද ඇති බව පෙනේ. මූලද්රව්ය DD5, DD6 අඩු වැටුප් සඳහා යෝජනා ක්රම වේ.
ක්ෂුද්ර පරිපථයේ ක්රියාකාරී හැකියාවන් පිළිබඳ සම්පූර්ණ විස්තරයක් සඳහා, අපි තවත් වැදගත්කමක් එකතු කළ යුතුය. පොඩි එකාගේ ක්රියාකාරී රූප සටහනෙන් පෙනෙන පරිදි, DD3, DD4 මූලද්රව්ය ඒකාබද්ධ කර 13 වන ක්ෂුද්ර පරිපථයේ ප්රදර්ශනය කෙරේ. තාර්කික 1 ට 13 ලබා දී ඇති බැවින්, DD3, DD4 මූලද්රව්ය DD2 ප්රේරකයේ Q і /Q ප්රතිදාන වලින් පුනරාවර්තන තොරතුරු ලෙස භාවිතා කරනු ඇත. මෙම මූලද්රව්යය සමඟ DD5, DD6 i ට්රාන්සිස්ටර VT1, VT2 අර්ධ කාල පරිච්ඡේදයක් සඳහා අදියර තුළ zі zsuv වනු ඇත, DBZH හි බල කොටසෙහි කාර්යය සහතික කිරීම, පාලමෙහි චක්ර දෙකක පරිපථය මගින් විමසනු ලැබේ. තාර්කික 0 ට 13 ලබා දුන්නේ නම්, DD3, DD4 මූලද්රව්ය අවහිර කරනු ලැබේ, එබැවින්. මෙම මූලද්රව්යවල ප්රතිදානය වෙනස් නොවේ (නිරන්තර තාර්කික 0). එබැවින්, DD1 මූලද්රව්යයේ ආවේගයන් DD5, DD6 යන මූලද්රව්ය එකතු කරනු ඇත. මූලද්රව්ය DD5, DD6, ද, සහ ප්රතිදාන ට්රාන්සිස්ටර VT1, VT2, අදියර අලාභයකින් තොරව (පැයක්) මාරු කරනු ලැබේ. DBZH හි බල කොටස තනි චක්ර පරිපථයක් සඳහා vikonan වන බැවින් එවැනි රොබෝ ක්ෂුද්ර පරිපථ මාදිලියක් විටින් විට ආපසු හැරේ. නිමැවුම් ට්රාන්සිස්ටර සහ ක්ෂුද්ර පරිපථ දෙකෙහිම එකතු කරන්නන් සහ විමෝචකයන් එකම ආකාරයකින් සන්සුන් කිරීමේ ක්රමය සමඟ සංයුක්ත වේ.
ද්වි-පහර පරිපථවල "zhorstka" තාර්කික එකමුතුවක් මෙන්, ජයග්රාහී වෝල්ටීයතාවයක් ඇත
යූරෙෆ් ක්ෂුද්ර පරිපථයේ අභ්යන්තර සොකට් (ක්ෂුද්ර පරිපථයේ චිප් 13 ක්ෂුද්ර පරිපථය 14 සමඟ සම්බන්ධ වේ).
දැන් අපි බලමු microcircuit එකේ analog path එක ගැන.
නිමැවුම් DD1 සඳහා කඳවුර තීරණය කරනු ලබන්නේ සංසන්දක PWM DA2 (රූප සටහන 4) හි නිමැවුම් සංඥාව මගිනි, එය DD1 හි එක් ආදානයක් මත විය යුතුය. DD1 හි වෙනත් ආදානයකට යා යුතු සංසන්දකයේ ප්රතිදාන සංඥාව DA1 (රූප සටහන 2), සාමාන්ය ක්රියාකාරිත්වයේ දී DD1 ප්රතිදානයට ගලා නොයයි, එය WIM - comparator DA2 හි පුළුල් ප්රතිදාන ස්පන්දන මගින් පෙන්නුම් කෙරේ.
මීට අමතරව, Fig. 13 හි රූප සටහන් වලින් එය ආදාන වෝල්ටීයතාව වෙනස් කරන විට, නමුත් ප්රතිලෝම නොවන විට, සංසන්දකයේ PWM (රූප සටහන 3) ක්ෂුද්ර පරිපථයේ ප්රතිදාන ස්පන්දනවල පළල (රූප සටහන් 12, 13) සමානුපාතිකව වෙනස් වනු ඇත. සාමාන්ය මෙහෙයුම් ප්රකාරයේදී, PWM සංසන්දන DA2 හි ප්රතිලෝම නොවන ආදානයේ වෝල්ටීයතා මට්ටම DA3 බිඳීමේ ප්රතිලෝම වෝල්ටීයතාවයෙන් පමණක් පෙන්වනු ලැබේ (එය DA4 බල ස්විචයේ ප්රතිදාන වෝල්ටීයතාවයට වඩා වැඩි බැවින්), වෝල්ටීයතාව සමාන වේ. සිරස් නොවන ආදාන 1 ක්ෂුද්ර පරිපථයේ ප්රතිලෝම සංඥාවේ සංඥාවට). එබැවින්, සංඥාවක් ලබා දෙන විට zvorotny zv'azku visnovok 1 microcircuit මත, නිමැවුම් ආවේගවල පළල හැරවුම් සංඥාවේ සංඥාවේ වෙනසට සමානුපාතිකව වෙනස් වනු ඇත, එහි රේඛාවේ දී, DBZH හි ප්රතිදාන වෝල්ටීයතාවයේ වෙනසට සමානුපාතිකව වෙනස් වනු ඇත. zvorotny zvorotny zv'yazok ම zvіdti ආරම්භ කරන්න.
8 සහ 11 ක්ෂුද්ර පරිපථවල ප්රතිදාන ස්පන්දන අතර කාල පරතරයන්, ප්රතිදාන ට්රාන්සිස්ටර VT1 සහ VT2 වසා තිබේ නම්, "මළ කලාප" ලෙස හැඳින්වේ.
DA1 සංසන්දනකය "මළ කලාප" සංසන්දනකය ලෙස හැඳින්වේ, මන්ද Vіn vyznaє අවම වශයෙන් හැකි її trivalіst. අපි වාර්තාව පැහැදිලි කරමු.
රූප සටහන 13 හි කාල ඔරලෝසු රූප සටහන් වලින්, PWM සංසන්දකයේ DA2 හි නිමැවුම් ස්පන්දනවල පළල, කුමන හේතුවක් නිසා හෝ වෙනස් වන බව පැහැදිලිය, එවිට, ස්පන්දනවල වත්මන් පළල මත පදනම්ව, සංසන්දකයේ නිමැවුම් ස්පන්දන වෙනස් වේ. DD1 තාර්කික මූලද්රව්යයේ ප්රතිදානය තෝරා ගැනීමට DA1 සංසන්දකයේ ස්පන්දනයට වඩා DA1 පුළුල් වනු ඇත. ක්ෂුද්ර පරිපථයේ ප්රතිදාන ස්පන්දනවල පළල, එසේ නොමැති නම්, සංසන්දනකය DA1 ක්ෂුද්ර පරිපථයේ ප්රතිදාන ආවේගවල පළල උපරිම සමාන වන බව පෙනේ. විනිමය අනුපාතිකය තීරණය වන්නේ එය ස්ථාපනය කර ඇති මාදිලියේ DA1 සංසන්දකයේ (ක්ෂුද්ර පරිපථ 4 ක් නරඹනු ලැබේ) නව නිපැයුම් නොවන ආදානයේ විභවය මගිනි. කෙසේ වෙතත්, අනෙක් පැත්තෙන්, ක්ෂුද්ර පරිපථයේ ප්රතිදාන ස්පන්දනවල අක්ෂාංශ නියාමනය කිරීමේ පරාසය සඳහා ප්රතිදාන 4 සඳහා ඇති හැකියාව සැලකිය යුතු ය. Vysnovka 4 හි විභවය වැඩි වීමත් සමඟ මුළු පරාසයම ශබ්ද කරයි. නියාමනයේ පුළුල් පරාසයක් ලබා ගත හැක්කේ නිමැවුම් සඳහා විභවය 4 හෝ 0 නම් පමණි.
කෙසේ වෙතත්, මෙම අවස්ථාවෙහිදී, දෝෂය ආරක්ෂිත නොවේ, එය සමඟ සම්බන්ධ වී ඇති අතර, "මළ කලාපයේ" පළල 0 ට සමාන විය හැකිය (උදාහරණයක් ලෙස, පල්වූ BDZh strum හි වෙනස් වැඩි වීමක් සඳහා). Tse යනු 8 සහ 11 ක්ෂුද්ර පරිපථවල ප්රධාන ආවේගයන් එකින් එක බාධාවකින් තොරව අනුගමනය කරන බවයි. තත්වය මේ සඳහා දොස් පැවරිය හැකිය, මම එය "නීතියට අනුකූලව බිඳවැටීමක්" ලෙස හඳුන්වනු ඇත. ඉන්වර්ටරයේ බල ට්රාන්සිස්ටරවල අවස්ථිති භාවය මගින් එය පැහැදිලි කර ඇති අතර, එය කම්පනය සහ රැලි ගැසිය හැක. එනම්, සංවෘත ට්රාන්සිස්ටරයේ පාදයේ පැයක්, දිලිසෙන සංඥාවක් යොදවා, සංවෘත ට්රාන්සිස්ටරයේ පාදයට - අගුළු හැරීමේ සංඥාවක් (එනම්, ශුන්ය "මළ කලාපයක්" සමඟ) නම්, අපට තත්වය පෙනෙනු ඇත. , එක් ට්රාන්සිස්ටරයක් තවමත් වසා නොමැති නම්, අනෙක දැනටමත් වසා ඇත. Todi සහ ට්රාන්සිස්ටරය stіytsі napіvbost මත බිඳවැටීම දෝෂාරෝපණය කරයි, ට්රාන්සිස්ටරයේ අද්දර හරහා විදින ඉරි දී polagaє. Strum tsey, අත්තික්කා යෝජනා ක්රමයෙන් දැකිය හැකිය. 5, මගේ යනු බල ට්රාන්ස්ෆෝමරයේ ප්රාථමික සුළං වන අතර ප්රායෝගිකව වටපිටාවක් නොමැත. Zakhist strumu සමහර විට පුරුදු නොවේ, මන්ද ස්ට්රම් ස්ට්රම් සංවේදකය හරහා ගලා නොයයි (රූප සටහනේ කිසිදු ඇඟවීමක් නොමැත; ස්ට්රම් සංවේදක නැවැත්වීමේ සැලසුම සහ මූලධර්මය ඉදිරි කොටස්වල සමාලෝචනය කෙරේ), එයින් අදහස් කරන්නේ මෙම සංවේදකයට පාලක පරිපථයට සංඥාවක් දැකිය නොහැකි බවයි. එමනිසා, පැයක් වැනි කෙටි කාලයක් තුළ අප්රසන්න ස්ට්රෝම් විශාලත්වයට ළඟා වේ. බල ට්රාන්සිස්ටර දෙකෙහිම දක්නට ලැබෙන ආතතියේ තියුණු වැඩිවීමක් සහ ප්රායෝගික mittevu їx z fret (නීතියක් ලෙස, probіy) නිෂ්පාදනය කිරීම අවශ්ය වේ. මීට අමතරව, ස්ට්රෝම් ස්ට්රෝමා විසි කිරීම බලය vipryamlyayuchy පාලමක ඩයෝඩයක ෆ්රෙට් එකෙන් පිටතට ගෙන යා හැකිය. මෙම ක්රියාවලිය අවසන් වන්නේ ට්රෙඩ්මිල් දැවී යාමෙන් වන අතර, එහි අවස්ථිති බව හරහා යෝජනා ක්රමයේ මූලද්රව්ය ග්රහණය කර නොගනී, නමුත් පළමු ට්රෙඩ්මිල් ආරක්ෂා කරයි.
ටොම් keruyucha වික්රියා; බල ට්රාන්සිස්ටර පදනම මත ගොනු කරන ලද මෙම ට්රාන්සිස්ටරවලින් එකක් හදිසියේ රැලි වී අනෙක් එක කැඩී යන ආකාරයට අච්චු කළ හැක. වෙනත් වචන වලින් කිවහොත්, බල ට්රාන්සිස්ටරවල පාදයට පෝෂණය වන විවේචනාත්මක ස්පන්දන අතර, ඔරලෝසු ශබ්දය ශුන්යයට ("මළ කලාපය") සමාන නොවේ. ට්රාන්සිස්ටරවල බල ස්විචයක් ලෙස ස්ථායීතාවයේ අවස්ථිතිභාවය මගින් අවම අවසර ලත් "මියගිය කලාපය" ත්රිත්වය තීරණය වේ.
ක්ෂුද්ර පරිපථයේ ගෘහ නිර්මාණ ශිල්පය මඟින් 4 ක්ෂුද්ර පරිපථයේ අතිරේක විභවය සඳහා "මළ කලාපයේ" අවම වෙව්ලීමේ අගය නියාමනය කිරීමට ඔබට ඉඩ සලසයි. Uref microcircuit හි අභ්යන්තර යොමු වෝල්ටීයතාවයේ ප්රතිදාන වෝල්ටීයතා බසයට සම්බන්ධ වන පැරණි ටයිමරයේ උපකාරය සඳහා මෙම ශ්රිතයේ විභවය වේ.
DBZH හි සමහර ප්රභේදයන් සෑම දිනකම එවැනි ඩිල්නික් ඇත. Tse යනු මෘදු ආරම්භක ක්රියාවලිය අවසන් වූ පසු (පහත div.), ක්ෂුද්ර පරිපථ 4 ක් ප්රදර්ශනය කිරීමේ විභවය 0. 1B ට සමාන වේ), එය එහි ධන ධ්රැවය සමඟ සංසන්දනාත්මක DA1 හි ප්රතිලෝම නොවන ආදානයට සම්බන්ධ වන අතර, ක්ෂුද්ර පරිපථයේ සම්බන්ධතාවය 4 ඍණ වේ. මේ අනුව, සංසන්දනකරු DA1 හි පිටතට යන ආවේගයේ පළල සහ එබැවින් එදිනෙදා මනස සඳහා "මළ කලාපයේ" පළල 0 ට සමාන විය නොහැකි අතර එයින් අදහස් වන්නේ "දුම්රිය ස්ථානයට අනුව බිඳවැටීම" මූලික වශයෙන් කළ නොහැකි වනු ඇත. වෙනත් වචන වලින් කිවහොත්, ක්ෂුද්ර පරිපථ ගෘහ නිර්මාණ ශිල්පය පදනම් වී ඇත්තේ නිමැවුම් ස්පන්දනයේ උපරිම ත්රිත්ව හුවමාරුව මත ය ("මළ කලාපයේ" අවම ත්රිත්ව අගය). Yakshcho є DILNIKA, PIDSKANIES සිට VISDIENNI 4 Mikrosemi දක්වා, පසුව PISLAL කොටස් PARTSIAL TSEOI DORIVNE 0 නොවේ, Vikhid comparator DA1 හි පළල වද වී ඇත්තේ අභ්යන්තර DA7 බව නොව, නමුත් supp - ෂෙඩ් සහිත melic සමග එක සමාන වේ) මෙය, තව දුරටත් පවසා ඇති පරිදි, PWM සංසන්දකයේ පළල නියාමනයේ ගතික පරාසය DA2 ශබ්ද කරයි.
START-UP යෝජනා ක්රමය
ආරම්භක පරිපථය වෝල්ටීයතා අඩු කිරීම සඳහා හඳුනාගෙන ඇති අතර, ජීවිත මිනුමේදී IVP සක්රිය කිරීමෙන් පසු ආරම්භක ක්රමය සමඟ බල ක්ෂුද්ර පරිපථය බල ගැන්වීමට භාවිතා කළ හැකිය. එබැවින්, ආරම්භයට පෙර, විවේචනාත්මක ක්ෂුද්ර පරිපථයක පළමු පේළියේ රොබෝවරයා දියත් කිරීමට අවශ්ය විය හැකිය;
දියත් කිරීමේ යෝජනා ක්රමය විවිධ ආකාර දෙකකින් ප්රේරණය කළ හැකිය:
ස්වයං-උද්දීපනයෙන්;
primus zbudzhennyam සිට.
ස්වයං-උද්දීපනය කිරීමේ යෝජනා ක්රමය ජයග්රාහී වේ, උදාහරණයක් ලෙස, GT-150W DBZH (රූපය 14). නිවැරදි කරන ලද වෝල්ටීයතා Uep ප්රතිරෝධක ප්රතිරෝධක R5, R3, R6, R4 සඳහා යොදනු ලැබේ, එය ප්රධාන බල ට්රාන්සිස්ටර Q1, Q2 දෙකෙහිම පදනම වේ. එබැවින්, ට්රාන්සිස්ටර හරහා, C5, C6 (Uep) ධාරිත්රකවල ඇති සම්පූර්ණ වෝල්ටීයතාවයේ එන්නත් කිරීම යටතේ, මූලික ධාරාව Lance (+) C5 - R5 - R7 - 6th Q1 - R6 - R8 - 6th Q2 - " ප්රාථමික පැත්තේ ගිනි වයර්" - (-) C6.
ස්ට්රම් එකක් සහිත ට්රාන්සිස්ටර වැරදි කිරීම. එහි ප්රතිඵලයක් ලෙස, එකතුකරන්නන්-විමෝචක පුවරු හරහා ට්රාන්සිස්ටර දෙකම අළුත්වැඩියා කරනු ලබන්නේ ලේන්සු දිගේ අන්යෝන්ය වශයෙන් ප්රතිවිරුද්ධ ඍජු රේඛා ගලා යන ධාරා මගිනි:
Q1 හරහා: (+) C5 - +310 V බස් - to-e Q1 - 5-6 T1 -1-2 T2-C9- (-) C5.
Q2 හරහා: (+) C6 - C9 - 2-1 T2 - 6-5 T1 - to-e Q2 - ප්රාථමික පැත්තේ "ගිනි වයර්" - (-) C6.

Malyunok 14. ස්වයං-උද්දීපනයෙන් DBZh GT-150W දියත් කිරීමේ යෝජනා ක්රමය.
අතිරේක (ආරම්භක) හරහා ගලා යන Yakby obidva strum, ප්රතිවිරුද්ධ සරල රේඛා 5-6 T1 හැරවීම, සමාන වනු ඇත, එවිට ප්රතිඵලය ස්ට්රම් 0 වෙත ළඟා වනු ඇත, සහ පරිපථය ආරම්භ කිරීමට නොහැකි වනු ඇත.
කෙසේ වෙතත්, ට්රාන්සිස්ටර Q1, Q2 හි ස්ට්රූමාවේ ශක්තියේ සංගුණකවල තාක්ෂණික ප්රසාරණය හේතුවෙන්, එය අනෙක් ඒවාට වඩා වැඩි විය යුතුය. ට්රාන්සිස්ටර වෙනස් වේ. එබැවින්, 5-6 T1 හැරවුම් හරහා ලැබෙන ස්ට්රම් 0 සඳහා හොඳ නොවන අතර අනෙක් ආකාරය විය හැක. ප්රවාහය ට්රාන්සිස්ටරය Q1 හරහා ගමන් කරයි (එනම්, Q1 විශාල ලෝකයට විවෘත වේ, පහළ Q2) සහ, එවිට, ප්රවාහය ප්රතිදානය 5 හි ඉදිරිපස සිට 6 T1 ප්රතිදානය දක්වා ගලා යයි. තවදුරටත් mirkuvannya දීමනාව කවුරුන් මත පදනම් වේ.
කෙසේ වෙතත්, සාධාරණත්වය සඳහා, ට්රාන්සිස්ටරය Q2 හරහා ප්රවාහය වඩා වැදගත් වන බව සැලකිල්ලට ගත යුතු අතර, පසුව ක්රියාවලිය පිළිබඳ සියලු වැඩිදුර විස්තර ට්රාන්සිස්ටර Q2 වෙත පෙර තබනු ඇත.
5-6 T1 හැරීම් හරහා ස්ට්රෝමා ගමන් කිරීම පාලක ට්රාන්ස්ෆෝමර් T1 හි එතීෙම් අන්යෝන්ය ප්රේරණය තුළ EPC පෙනුම ඇති කරයි. මෙම (+) EPC සමග visnovka 4 shodo 5 i මත දොස් පවරන ලදී tsієї EPC ගලා dodatkovo strum ගලා ඒම යටතේ පදනම Q1 බවට, yogo v_dkrivaє lancet දිගේ: 4 T1 - D7-R9-R7-6-3 Q1 - 5 T1.
7 T1 ප්රදර්ශනයේ පැයක් (-) EPC 8, tobto පෙන්වීමට ආසන්නයි. Q2 සඳහා EPC රේඛාවේ ධ්රැවීයතාව දැල්වෙමින් පවතින අතර නහර වසා ඇත. ඩාලි ධෛර්යය ලබා ගනිමින් ධනාත්මක ආපසු ඇමතුමක් (PIC) ලබා ගනී. වෙනස පවතින්නේ ප්රවාහය එකතු කරන්නා-විමෝචනය Q1 හරහා වර්ධනය වී එතීෙම් 4-5 T1 මත 5-6 T1 හැරෙන විට, EPC, yak හි වර්ධනය, Q1 සඳහා අතිරේක පාදක ධාරාවක් නිර්මාණය කිරීම, යෝගයේ විශාල ලෝකයකි. මෙම ක්රියාවලිය හිම කුණාටුවක් (විවාදාත්මක ලෙස වේගවත්) මෙන් වර්ධනය වන අතර Q1 හි සම්පූර්ණ පුනරාවර්තනයකට සහ Q2 හි අඩු වීමක් ඇති කරයි. Q1 හි වෝල්ටීයතාවය සහ බල ස්පන්දන ට්රාන්ස්ෆෝමරයේ T2 හි ප්රාථමික එතීෙම් 1-2 හරහා, ස්ට්රම් ගලා යාමට පටන් ගනී, එය රේඛීයව වර්ධනය වේ, එය T2 හි සියලුම එතුම් මත අන්යෝන්ය ප්රේරණයේදී EPC ස්පන්දනයක පෙනුම කැඳවයි. වංගු 7-5 T2 සිට ආවේගය සමුච්චිත ධාරිතාව C22 ආරෝපණය කරයි. C22 හිදී, ජීවය දෙන මයික්රොචිප් 12 IC1 වර්ගයේ TL494 සහ භාවිතා කරන කඳුරැල්ල මෙන් වෝල්ටීයතාවයක් යොදනු ලැබේ. ක්ෂුද්ර පරිපථය ආරම්භ වන අතර එහිම පරිපථ 11, 8 සරල රේඛා අනුපිළිවෙලින් ස්පන්දන අනුපිළිවෙලක් ජනනය කරයි, එය කඳුරැල්ල (Q3, Q4, T1) හරහා Q1, Q2 යන බල ස්විචයන් නැවත සකස් කිරීමට පටන් ගනී. බල ට්රාන්ස්ෆෝමර් T2 හි සියලුම එතීෙම් මත, නාමික අගයක EPC ස්පන්දන ඇත. 3-5 සහ 7-5 වංගු වලින් EPC වෙනස් කිරීමත් සමඟ, නියත වෝල්ටීයතා මට්ටම (+ 27V ට ආසන්න) පවත්වා ගනිමින් C22 නිරන්තරයෙන් වැඩි කරන්න. වෙනත් වචන වලින් කිවහොත්, ක්ෂුද්ර පරිපථය සුචරිත සබැඳියේ වළල්ලට අනුව (ස්වයං-ස්ථායී) ආස්වාදයක් ලබා ගැනීමට පටන් ගනී. බ්ලොක් මෙහෙයුම් මාදිලියට ඇතුල් වේ. ක්ෂුද්ර පරිපථයේ ජීවිතයේ වෝල්ටීයතාවය සහ පටු කඳුරැල්ල අතිරේක වේ, බ්ලොක් මධ්යයේ පමණක් සහ ශබ්දය Upom ලෙස හැඳින්වේ.
මෙම යෝජනා ක්රමය විවිධ වර්ගවල මවක් ලෙස භාවිතා කළ හැකිය, උදාහරණයක් ලෙස, Mazovia CM1914 පරිගණකය සඳහා LPS-02-150XT ආවේග බ්ලොක් (තායිවානය නිෂ්පාදනය) (රූපය 15). මෙම යෝජනා ක්රමය තුළ, ආරම්භක ක්රියාවලිය සංවර්ධනය සඳහා cob post බලය ස්විච, ප්රතිරෝධක සඳහා මූලික රේඛාවේ පළමු ධනාත්මක පළමු කාල පරිච්ඡේදය පෝෂණය කරන එක්-pv-කාලසීමාව සෘජුකාරක D1, C7 උපකාරය සඳහා යා යුතුය. dilnik. Tse දියත් කිරීමේ ක්රියාවලිය වේගවත් කරයි, මන්ද බොහෝ විට, එක් යතුරු ධාරිත්රක ආරෝපණයට සමාන්තරව සම්බන්ධ වන අතර එය විශාල ධාරිතාවක් සුමට කරයි. එසේ නොමැති නම්, යෝජනා ක්රමය ඉහත සමාලෝචනයට සමාන ආකාරයකින් ක්රියා කරයි.

රූපය 15. LPS-02-150XT හි ස්පන්දන කොටසෙහි ස්වයං-උද්දීපනයෙන් ආරම්භ කිරීමේ යෝජනා ක්රමය
එවැනි යෝජනා ක්රමයක් ජයග්රාහී වේ, උදාහරණයක් ලෙස, LING YIN GROUP (තායිවානය) විසින් DBZh PS-200B.
විශේෂ ආරම්භක ට්රාන්ස්ෆෝමර් T1 හි ප්රාථමික වංගු කිරීම අර්ධ වෝල්ටීයතාවයකින් (නාමික 220V දී) හෝ සම්පූර්ණ වෝල්ටීයතාවයකින් (නාමික 110V දී) මාරු කරනු ලැබේ. Tse නිශ්ශබ්දව වැඩ කිරීමට, ද්විතියික වංගු සහිත T1 මත විචල්ය වෝල්ටීයතාවයේ විස්තාරය ජීවන රේඛාවේ ශ්රේණිගත කිරීම සමඟ නොගැලපේ. ප්රාථමික වංගු සහිත T1 හරහා, DBZh සක්රිය කර ඇති විට, වෙනස් ස්ට්රම් එකක් දැල හරහා ගලා යයි. ද්විතියික වංගු 3-4 T1 මත, ජීවන රේඛාවේ සංඛ්යාතය සහිත විචල්ය sinusoidal EPC ප්රේරණය වේ. EPC ගලා ඒම යටතේ ගලා යන ස්ට්රම්, ඩයෝඩ D3-D6 මත විශේෂ දිය පහරක් මගින් සෘජු කර ඇති අතර C26 ධාරිත්රකය මගින් සුමට කරනු ලැබේ. C26 හි, 10-11V ට ආසන්න නියත වෝල්ටීයතාවයක් දක්නට ලැබේ, එය ජීවය දෙන 12 ක්ෂුද්ර පරිපථ U1 වර්ගයේ TL494 ලෙස සහ කාලගුණය කුමක් වුවත් කඳුරැල්ලට පෝෂණය වේ. මෙම ක්රියාවලියට සමාන්තරව, පෙරහන් ධාරිත්රකවල ආරෝපණය ආරෝපණය වන අතර එය සුමට වේ. එබැවින්, ක්ෂුද්ර පරිපථයට විදුලිය සපයන අවස්ථාවේදී, බල කඳුරැල්ල ද බල ගැන්වෙන බව පෙනේ. ක්ෂුද්ර පරිපථය ආරම්භ වී එහිම පරිපථ 8, 11 ක සෘජු රේඛීය ආවේග අනුපිළිවෙලක් උත්පාදනය කිරීමට පටන් ගනී, එනම් කඳුරැල්ලක් හරහා අවශ්ය වන, බල යතුරු මාරු කිරීම ආරම්භ කරන්න. එහි ප්රතිඵලයක් වශයෙන්, බ්ලොක් එකේ ප්රතිදාන වෝල්ටීයතා ප්රකාශ කරනු ලැබේ. ක්ෂුද්ර පරිපථයේ ස්වයංපෝෂිත මාදිලියට ඇතුල් වීමෙන් පසුව, එය සම්බන්ධ කර ඇති ඩයෝඩය D8 හරහා ප්රතිදාන වෝල්ටීයතා බස් + 12V සිට සිදු කරනු ලැබේ. ඉතින්, ට්රොච් හි ස්වයං-තිරසාර වෝල්ටීයතාවයේ වෝල්ටීයතාවය D3-D5 ප්රතික්රියාකාරකයේ වෝල්ටීයතාවය ඉක්මවා යන බැවින්, ආරම්භක ප්රතිග්රාහකයේ ඩයෝඩ ෆ්ලිකර් වන අතර වෝල්ටීයතාව පරිපථයේ ක්රියාකාරිත්වයට ගලා එන්නේ නැත.
ඩයෝඩය D8 හරහා සුවදායී සම්බන්ධතාවයක් සඳහා අවශ්යතාවය බැඳී නැත. සමහර BDZH, ද zastosovuetsya primusov zbudzhennya යෝජනා ක්රම, එවැනි සබැඳියක් දිනපතා වේ. භාවිතා කරන මයික්රොචිප් සහ කැස්කැඩ් කෙටි කාලයක් සඳහා රොබෝවරු ක්රියාත්මක වන්නේ ආරම්භක කම්පන යන්ත්රයේ ප්රතිදානයෙනි. කෙසේ වෙතත්, මෙම නඩුවේ Upom බසයේ ස්පන්දන අනුපාතය සාමාන්යයෙන් විශාල වේ, ප්රතිදාන වෝල්ටීයතා බසයෙන් + 12V සිට microcircuit සංවර්ධනය කිරීමේදී අඩුය.
දියත් කිරීමේ යෝජනා ක්රම පිළිබඳ විස්තරය සාරාංශ කිරීම, ඔබට ඔවුන්ගේ අභිප්රේරණයේ ප්රධාන ලක්ෂණ නම් කළ හැකිය. ස්වයං-උද්දීපන පරිපථයේ, බල ට්රාන්සිස්ටරවල ප්රත්යාවර්තයක් සිදු කරනු ලබන අතර, එහි ප්රතිඵලයක් ලෙස Upom microcircuit හි වෝල්ටීයතාවයක් දිස්වේ. ප්රාථමික ප්රාථමිකය සහිත පරිපථයේ, Upom ඉවත් කර ඇති අතර, එහි ප්රතිඵලයක් ලෙස බල ට්රාන්සිස්ටර මාරු කිරීම. මීට අමතරව, ස්වයං-උද්දීපනය සහිත පරිපථවලදී, වෝල්ටීයතා Upom ශබ්දය + 26V ට ආසන්න විය හැකි අතර, ප්රාථමික ප්රාථමිකය සහිත පරිපථවල එය + 12V ට ආසන්න වේ.
primus zbudzhennyam සමග පරිපථය (ට්රාන්ස්ෆෝමරයක් සහිත) රූපය 16 හි පෙන්වා ඇත.

රූපය 16. PS-200B ස්පන්දන ඒකකයේ (LING YIN GROUP) ප්රාථමික අනතුරු ඇඟවීමේ ආරම්භය සඳහා යෝජනා ක්රමය.
කාලගුණ කැස්කැඩ්
vіd අඩු පීඩන lanceugіv කළමනාකරණය uzgodzhuychiy කඳුරැල්ල සේවය rozvyazki natuzhnogo vykhіdnogo කඳුරැල්ල බව uzgodzhennya සඳහා.
විවිධ BDZh හි පටු කඳුරැල්ලක් ඇති කිරීම සඳහා ප්රායෝගික යෝජනා ක්රම ප්රධාන විකල්ප දෙකකට බෙදිය හැකිය:
ට්රාන්සිස්ටර ප්රභේද්යයක්, ඩි යක් යතුරු vikoristovuyutsya zovnіshnі ට්රාන්සිස්ටර විවික්ත vikonannі;
ට්රාන්සිස්ටර නොවන ප්රභේදය, de-yak යතුරු ඉතා වැදගත් ක්ෂුද්ර පරිපථ VT1, VT2 (ඒකාබද්ධ පරිපථයේ) ට්රාන්සිස්ටරවලින් පිටතට මාරු කරනු ලැබේ.
මීට අමතරව, භාවිතා කළ හැකි කැස්කැඩ් වර්ගීකරණය කළ හැකි තවත් එක් ලකුණක් වන්නේ නැප්බ්රිජ් ඉන්වර්ටරයක බල ට්රාන්සිස්ටර පාලනය කිරීමේ ක්රමයකි. මෙම ලකුණ සඳහා, සියලුම uzgodzhuvalny කඳුරැල්ල පහත පරිදි බෙදිය හැකිය:
බල ට්රාන්සිස්ටර දෙකෙහිම පාලනය උඩිස් පාලක වලින් ලැබෙන කඳුරැල්ල, ඒවාට තීරණාත්මක වන තනි ට්රාන්ස්ෆෝමරයක ආධාරයෙන් සිදු කරනු ලැබේ, එයට ප්රාථමික සහ ද්විතියික වංගු දෙකක් ඇත;
වෙනම පරිපථ සහිත කඳුරැල්ල, බල ට්රාන්සිස්ටර වලින් සම පරිපථ අසල ඇති ට්රාන්ස්ෆෝමරයක ආධාරයෙන් කම්පනය වේ, එනම්. දෙවන කඳුරැල්ල තුළ පාලන ට්රාන්ස්ෆෝමර් දෙකක් ඇත.
Vikhodyachi ගේ වර්ගීකරණයන් දෙකම පටු කඳුරැල්ල පහත දැක්වෙන ක්රම වලින් එකක් vikonanie විය හැක:
උඩිස් පාලක වලින් ට්රාන්සිස්ටරීකරණය කර ඇත;
වෙනම පාලන වලින් ට්රාන්සිස්ටරීකරණය කර ඇත;
උඩිස් පාලන වලින් ට්රාන්සිස්ටර රහිත;
වෙනම පාලන වලින් ට්රාන්සිස්ටර රහිත.
වෙනම පරිපථ සහිත ට්රාන්සිස්ටර කැස්කැඩ් කලාතුරකින් සිරවී හෝ සිරවී නැත. කතුවරුන්ට එවැනි විකල්පයක් සමඟ කඳුරැල්ල වසා දැමීමට අවස්ථාවක් නොතිබුණි. අනෙක් විකල්ප තුන වැඩි වැඩියෙන් සහ අඩුවෙන් දිස්වේ.
සියලුම මාදිලියේදී, බල කැස්කැඩ් එකකින් සම්බන්ධතා ට්රාන්ස්ෆෝමර් ආකාරයෙන් සාදා ඇත.
මෙම ට්රාන්ස්ෆෝමරය සමඟ, ප්රධාන කාර්යයන් දෙකක් ඇත: ස්ට්රම් සංඥාව ශක්තිමත් කිරීම (වෝල්ටීයතා දුර්වල කිරීම සඳහා) සහ ගැල්වනික් විසංයෝජනය. Galvanic decoupling අවශ්ය වන්නේ බලශක්ති පරිපථය සහ භාවිතා කළ හැකි කඳුරැල්ල, ද්විතියික පැත්තේ වන අතර, DBZH හි ප්රාථමික පැත්තේ බල කඳුරැල්ල වේ.
විශේෂිත බට් මත පටු කඳුරැල්ල සඳහා විකල්ප චර්ම හඳුනාගැනීමේ කාර්යය දෙස බලමු.
ඉහළ පාලක වලින් ට්රාන්සිස්ටර පරිපථයේ, පටු කඳුරැල්ලක් ලෙස, ට්රාන්සිස්ටර Q3 සහ Q4 මත ද්වි-පහර ට්රාන්ස්ෆෝමර් ඉදිරිපස පීඩන මර්ධකයක් ඇත (රූපය 17).

Malyunok 17. KYP-150W (උණුසුම් පරිපථයේ සිට ට්රාන්සිස්ටර පරිපථය) ජීවයේ ස්පන්දන වාරණ Uzgodzhuychiy කඳුරැල්ල.

රූපය 18. එකතුකරන්නන් මත ස්පන්දනවල සැබෑ හැඩය
DT හරය තුළ ගබඩා කර ඇති චුම්බක ශක්තිය ගලා ඒම යටතේ ගලා යන ඩයෝඩ D7 සහ D9 හරහා Strumi, ඝාතකයන් මෙන් දිස් විය හැකි අතර, එය අඩු වනු ඇත. DT හරයේදී, ඩයෝඩ D7 සහ D9 හරහා ස්ට්රම්ස් ප්රවාහය විචල්ය (අඩු වන) චුම්බක ප්රවාහයක් ඇති අතර එමඟින් ද්විතියික වංගු මත EPC ස්පන්දන පෙනුම ඇති වේ.
ඩයෝඩ D8 භාවිතා කරනුයේ සජීවී බස් රථයක් හරහා පාලනය වන ක්ෂුද්ර පරිපථයකට පටු කඳුරැල්ලක් එන්නත් කිරීමෙනි.
ඉහළ පාලන වලින් ට්රාන්සිස්ටර පටු කඳුරැල්ලේ දෙවන ප්රභේදය ESAN ESP-1003R ස්පන්දන බල සැපයුමෙහි වාදනය වේ (රූපය 19). මෙම විකල්පයෙහි පළමු විශේෂ ලක්ෂණය වන්නේ විමෝචක පුනරාවර්තකයක් ලෙස ක්රියාත්මක කිරීම සඳහා ක්ෂුද්ර පරිපථයේ ට්රාන්සිස්ටර VT1, VT2 භාවිතා කරන ඒවා වේ. ප්රතිදාන සංඥා පරිපථ 9 කින්, ක්ෂුද්ර පරිපථ 10 කින් ලබා ගනී. ප්රතිරෝධක R17, R16 і R15, R14 යනු em-terminated transistors VT1 සහ VT2, පැහැදිලිවම. Qi ප්රතිරෝධක යතුරු මාදිලියේ ක්රියා කරන බැවින් ට්රාන්සිස්ටර Q3, Q4 සඳහා මූලික ස්විචයන් ලෙස භාවිතා කරයි. C13 සහ C12 ධාරිතාවන් ට්රාන්සිස්ටර Q3, Q4 මාරු කිරීමේ ක්රියාවලීන් බලහත්කාරයෙන් හා වේගවත් කරයි. කස්සේඩයේ තවත් ලාක්ෂණික ලක්ෂණයක් වන්නේ පාලනය කරන ලද ට්රාන්ස්ෆෝමර් DT හි ප්රාථමික වංගු කිරීම මැද ලක්ෂ්යයට සම්බන්ධ කළ නොහැකි අතර ට්රාන්සිස්ටර Q3, Q4 එකතුකරන්නන් අතර සම්බන්ධ කිරීමයි. ක්ෂුද්ර පරිපථයේ ප්රතිදාන ට්රාන්සිස්ටර VT1 සක්රිය කර ඇත්නම්, එවිට වෝල්ටීයතා Upom ට්රාන්සිස්ටරය Q3 dilnik R17, R16 සඳහා පදනම ලෙස භාවිතා කරයි. එබැවින්, යතුරු සංක්රාන්තිය Q3 හරහා ස්ට්රම් එකක් ගලා යන අතර නහර කැඩී යයි. C13 හි ධාරිතාව බලහත්කාරයෙන් මෙම ක්රියාවලිය වේගවත් කරන්න, එමඟින් Q3 පදනමට ස්ට්රම් සැපයුම සහතික කිරීම සඳහා, නියමිත අගය ඉක්මවා 2-2.5 ගුණයකින් පෙන්නුම් කරයි. Q3 වංගු කිරීමේ ප්රතිඵලයක් ලෙස, එහි එතීෙම් 1 සමඟ ප්රාථමික වංගු 1-2 DT ශරීරයට සම්බන්ධ වී ඇති බව පෙනේ. එබැවින් වෙනත් ට්රාන්සිස්ටර Q4 පරිපථ මෙන්, ප්රාථමික වංගු සහිත DT හරහා ඔබ ලාන්ස් එකකින් ගලා යන ස්ට්රම් එකක් ආරම්භ කරන්න: Upom - R11 - 2-1 DT - Q3 දක්වා - නඩුව.

Malyunok 19. ආවේග බල සැපයුම් ඒකකයේ කඳුරැල්ල ESP-1003R ESAN ELECTRONIC CO., LTD (ඉහළ පාලනයක් සහිත ට්රාන්සිස්ටර පරිපථය).
ද්විතියික වංගු මත 3-4 සහ 5-6 DT, සෘජුකෝණාස්රාකාර හැඩයේ EPC ස්පන්දන යොදනු ලැබේ. ද්විතියික වංගු වල සෘජු වංගු DT වෙනස්. එමනිසා, බල ට්රාන්සිස්ටර වලින් එකක් (රූප සටහනේ පෙන්වා නැත) වක්රය හරවන මූලික ආවේගය ගන්නා අතර අනෙක් එක වක්රය වසා දමයි. විශේෂිත ක්ෂුද්ර පරිපථයේ VT1 තියුණු ලෙස වැසෙන්නේ නම්, Q3 ද ඊට පසු තියුණු ලෙස වැසෙයි. C13 ධාරණාව සුව කිරීමේ ක්රියාවලිය වේගවත් කිරීමට බල කිරීම, Q3 පාද-විමෝචක හන්දියට පෙර යොදන වෝල්ටීයතාවය ධ්රැවීයතාව වසා දමයි. Dali trivaє "මළ කලාපය", ක්ෂුද්ර පරිපථයේ වැරදි ට්රාන්සිස්ටර වසා තිබේ නම්. ඊළඟට, ප්රතිදාන ට්රාන්සිස්ටරය VT2 සක්රිය වන අතර, එය තවත් ට්රාන්සිස්ටර Q4 dilnik R15, R14 සඳහා බල සැපයුම් වෝල්ටීයතාව Upom පදනම මත ද හැරේ. ඒ සඳහා Q4 වක්ර වී ඇති අතර ප්රාථමික වංගු සහිත 1-2 DT එහි අනෙක් කෙළවර (visnovka 2) සමඟ ශරීරයට සම්බන්ධ කර ඇති අතර, ඒ හරහා ලැන්සෙට් දිගේ protilazhny තීර්යක් වැටීමේ වැඩෙන ස්ට්රම් එකක් ගලා යාමට පටන් ගනී: Upom -R10. - 1-2 DT - to-e Q4 - "රාමු".
එබැවින්, DT හි ද්විතියික වංගු මත ආවේගවල ධ්රැවීයතාව වෙනස් වන අතර, එම ආවේග වක්රය වෙනත් බල ට්රාන්සිස්ටරයක් ගන්නා නමුත් පළමු ආවේගයේ පාදයේ දී ධ්රැවීය වක්රය වැසී යයි. විවේචනාත්මක ක්ෂුද්ර පරිපථයේ VT2 තියුනු ලෙස වැසෙන්නේ නම්, Q4 ද එය පිටුපස තියුණු ලෙස වැසෙයි (අතිරේක බූස්ටර ධාරිතාව C12 සඳහා). අපි නව "මළ කලාපයක්" ලබා දුන්නෙමු, ඉන්පසු ක්රියාවලීන් නැවත නැවතත් සිදු කෙරේ.
මේ ආකාරයට, ප්රධාන අදහස මෙම කඳුරැල්ලේ කාර්යයට ඇතුළත් කර ඇති අතර එය පදනම් වී ඇත්තේ DT හරයේ ඇති සැලකිය යුතු චුම්භක ප්රවාහය ප්රාථමික එතීෙම් DT නඩුවට සම්බන්ධ කර ඇති බව සැලකිල්ලට ගැනීමට ඉඩ දී ඇති බැවිනි. එකක්, පසුව එහි අනෙක් කෙළවර සමඟ. ඒක ධ්රැවීය ජීවයක් සහිත ස්ථිර ගබඩාවක් නොමැතිව ඒ හරහා විපර්යාස ධාරාවක් ගලා යන්නේ එබැවිනි.
DBZH හි පටු කැස්කැඩ් වල ට්රාන්සිස්ටර නොවන ප්රභේදවල, පටු කඳුරැල්ලේ ට්රාන්සිස්ටර වැනි, කලින් පවරා ඇති පරිදි, ට්රාන්සිස්ටර VT1, VT2 ක්ෂුද්ර පරිපථයෙන් පිටතට මාරු කරනු ලැබේ. මේ ආකාරයෙන්, පටු කඳුරැල්ලේ විවික්ත ට්රාන්සිස්ටර ලබා ගත හැකිය.
ඉහළ පාලක වලින් ට්රාන්සිස්ටර රහිත පරිපථය ජයග්රාහී වේ, උදාහරණයක් ලෙස, PS-200V DBZH පරිපථයේ. ක්ෂුද්ර පරිපථ VT1, VT2 හි ප්රතිදාන ට්රාන්සිස්ටර, ට්රාන්ස්ෆෝමර් DT හි පළමු දඟර සමඟ එකතු කරන්නන් විසින් තුවාළනු ලැබේ (රූපය 20). ප්රාථමික වංගු DT හි මධ්ය ලක්ෂ්යයට ජීවය සපයනු ලැබේ.
රූපය 20
ට්රාන්සිස්ටරය VT1 සක්රිය වුවහොත්, වර්ධනය වන ප්රවාහය සම්පූර්ණ ට්රාන්සිස්ටරය හරහා ගලා යන අතර DT ට්රාන්ස්ෆෝමරයේ 1-2 වංගු කරයි. DT හි ද්විතියික වංගු මත, එවැනි ධ්රැවීයතාවක් ඇති කරන ස්පන්දන කිහිපයක් තිබේ, ඉන්වර්ටරයේ එක් බල ට්රාන්සිස්ටරයක් ක්රියාත්මක වන අතර අනෙක් එක වැසෙයි. VT1 ස්පන්දනය අවසන් වූ පසු, එය තියුණු ලෙස වැසෙයි, 1-2 DT එතීෙම් හරහා ජෙට් යානය ගලා යාම නතර කරයි, මෙය DT හි ද්විතියික වංගු මත EPC ඇති කරයි, එමඟින් බල ට්රාන්සිස්ටර වැසී යයි. Dali trivaє "මළ කලාපය", microcircuit හි වැරදි ට්රාන්සිස්ටර VT1, VT2 වසා තිබේ නම්, සහ ධාරාව ප්රාථමික එතීෙම් DT හරහා ගලා නොයයි. එවිට ට්රාන්සිස්ටර VT2 සක්රිය කර ස්ට්රම්, පැය ගණනින් වැඩි වන අතර සම්පූර්ණ ට්රාන්සිස්ටරය හරහා ගලා යන අතර 2-3 DT වංගු කරයි. DT හරයේ ඇති සයිම් ස්ට්රම් විසින් නිර්මාණය කරන ලද චුම්බක ප්රවාහය, කෙළින්ම ඉදිරි දිශාවට පිහිටා තිබිය හැක. එබැවින්, ද්විතියික වංගු DT මත, EPCs ඉදිරි ධ්රැවීයතාවේ ප්රතිවිරුද්ධ දිශාවට ප්රේරණය වේ. එහි ප්රතිඵලයක් වශයෙන්, නැප්බ්රිජ් ඉන්වර්ටරයේ තවත් ට්රාන්සිස්ටරයක් සක්රිය කර ඇති අතර, පළමු ස්පන්දනයේ පදනම මත, දෙවන ධ්රැවීයතාව නිවා දැමිය හැකිය. ක්ෂුද්ර පරිපථයේ VT2 වසා තිබේ නම්, ස්ට්රෝම් නව සහ ප්රාථමික වංගු සහිත DT හරහා සම්බන්ධ වේ. එබැවින්, ද්විතියික වංගු DT මත EPC, සහ ඉන්වර්ටරයේ බල ට්රාන්සිස්ටර නැවත වසා ඇත. අපි නව "මළ කලාපයක්" ලබා දුන්නෙමු, ඉන්පසු ක්රියාවලීන් නැවත නැවතත් සිදු කෙරේ.
කඳුරැල්ල දිරිගැන්වීමේ ප්රධාන අදහස වන්නේ ට්රාන්ස්ෆෝමරයේ හරයේ ඇති චුම්බක ප්රවාහය වෙනස් කිරීම, එය පාලනය කරන, ට්රාන්ස්ෆෝමරයේ ප්රාථමික එතීෙම් මැද ලක්ෂ්යයට බලශක්ති සැපයුම ඉවත් කිරීමයි. ඒ නිසාම විවිධ කෙලින් එකම වාර ගණනකින් වංගු හරහා ධාරා ගලා යයි. ක්ෂුද්ර පරිපථයේ වැරදි ට්රාන්සිස්ටර වසා තිබේ නම් ("මිය ගිය කලාප"), DT හරයේ චුම්බක ප්රවාහය හොඳයි. එහි ප්රතිඵලයක් වශයෙන් හරයේ ඇති චුම්බක ප්රවාහය වෙනස් වනු ඇත.
විවිධ වර්ගවල ඉතිරි තනතුරු (වෙනම පාලනයන් සහිත ට්රාන්සිස්ටර රහිත පරිපථය) ජයග්රාහී වේ, උදාහරණයක් ලෙස, Appis පරිගණකයේ (පේරු) DBZh හි. මෙම පරිපථයට පාලන ට්රාන්ස්ෆෝමර් DT1, DT2 දෙකක් ඇත, ඒවායේ ප්රාථමික එතුම් ක්ෂුද්ර පරිපථයේ ප්රතිදාන ට්රාන්සිස්ටර සඳහා එකතු කරන්නා දඟර වේ (රූපය 21). මෙම පරිපථයේ, බල ස්විච දෙකකින් සම ආරක්ෂා කිරීම සිලිකන් ට්රාන්ස්ෆෝමරයක් හරහා සිදු කෙරේ. පාලන ට්රාන්ස්ෆෝමර් DT1, DT2 හි ප්රාථමික වංගු වල මැද ලක්ෂ්ය හරහා Upom බසයේ සිට ක්ෂුද්ර පරිපථයේ ප්රතිදාන ට්රාන්සිස්ටර එකතු කරන්නන් වෙත සජීවී බලය සපයනු ලැබේ.
ප්රාථමික වංගු DT1, DT2 ප්රධාන කොටස් සමග ඩයෝඩ D9, D10 මධ්යය demagnetization පරිපථ ස්ථාපිත. අපි බලමු පෝෂණ වාර්තාව මොකක්ද කියලා.

Malyunok 21. "Appis" ආවේග බල සැපයුම් ඒකකයේ Uzgodzhuvalny කඳුරැල්ල (ට්රාන්සිස්ටර රහිත බෙදීම් පාලන පරිපථය).
පටු කඳුරැල්ල (රූපය 21) ඇත්ත වශයෙන්ම ස්වාධීන තනි-පහර සෘජු-ධාවන ප්රතිවර්තන දෙකකි, මන්ද v_dkrivaє strum protіkaє බලය ට්රාන්සිස්ටරය pіd පැය vіdkritogo පදනම මම uzgodzhuvalny ට්රාන්සිස්ටරය, tobto බවට පත් වනු ඇත. ට්රාන්ස්ෆෝමර් බලය ට්රාන්සිස්ටරය vіdkritі එක පැය හරහා ඔහු pov'yazany z බව Uzgodzhuyuchiy. ඒ අතරම, ආවේග ට්රාන්ස්ෆෝමර් DT1, DT2 ප්රාථමික එතීෙම් ස්ථිර ගබඩා ජෙට් සමඟ භාවිතා වේ. іz vimusenim pіdmagnіchuvannyam. ඔබ හරයේ ප්රතිචුම්බකකරණයෙන් විශේෂ යෙදවුම් මාරු නොකරන්නේ නම්, රොබෝ වැඩවල කාල පරිච්ඡේද කිහිපයක් සඳහා චුම්භක බලයෙන් දුගඳ දකිනු ඇත, එය ප්රාථමික වංගු වල ප්රේරණයේ සහ පිටවීමේ සැලකිය යුතු වෙනසක් ඇති කරයි. පනින ට්රාන්සිස්ටර VT1, VT2 ෆ්රෙට් එකෙන්. ට්රාන්සිස්ටර VT1 සහ ට්රාන්ස්ෆෝමර් DT1 මත පරිවර්තනය වන ක්රියාවලි දෙස බලමු. ට්රාන්සිස්ටරය VT1 ක්රියාත්මක වන්නේ නම්, නව සහ ප්රාථමික වංගු සහිත 1-2 DT1 හරහා ප්රවාහයක් ගලා යයි, එය රේඛීයව, ලේන්සුව දිගේ වර්ධනය වේ: Upom -2-1 DT1 - to-e VT1 - "body".
VT1 මට්ටම ඉහළ යාමත් සමඟ අගුළු හැරීමේ ආවේගය අවසන් වුවහොත්, වාතාශ්රය තියුණු ලෙස වැසෙයි. එතීෙම් 1-2 DT1 හරහා ජෙට් යානය සවි කර ඇත. කෙසේ වෙතත්, එතීෙම් මත EPC, ධ්රැවීයතාව වෙනස් කරන විට, 2-3 DT1 නැවත චුම්භක කරයි, සහ එතීෙම් සහ ඩයෝඩය D10 හරහා Lance දිගේ remagnetizing core DT1 strum හරහා ගලා යයි: 2 DT1 - Upom - C9 - "case" - D10 -3DT1.
Strum tsey - රේඛීයව වැටීම, tobto. හරය DT1 හරහා චුම්බක ප්රවාහයට සමාන ලකුණ වෙනස් කරයි, සහ හරය demagnetized වේ. මේ ආකාරයට, හැරවුම් චක්රයේ පැය යටතේ, VT1 ට්රාන්සිස්ටරයේ පැයකට DT1 හරයේ ගබඩා කර ඇති අතිරික්ත ශක්තිය dzherelo බවට පත් වේ (Upom බස් රථයේ ගබඩා ධාරිත්රකය C9 ආරෝපණය වේ).
කෙසේ වෙතත්, අවම වරප්රසාදවල පටු කඳුරැල්ල ක්රියාත්මක කිරීමේ එවැනි ප්රභේදයක්, මන්ද ට්රාන්ස්ෆෝමර් DT1, DT2 ප්රේරණය මගින් අඩු වෝල්ටීයතාවයකින් සහ ප්රාථමික වංගු කිරීමේ ස්ථිර ගබඩා ජෙට් සමඟ ක්රියාත්මක වේ. පුද්ගලික චක්රයකින් පසුව DT1, DT2 හරය නැවත චුම්භකකරණය නිරීක්ෂණය කරනු ලැබේ, එය ප්රේරණයේ ධනාත්මක අගයන් පමණක් නිරීක්ෂණය කෙරේ. දම්වැල හරහා හදවත් තුළ චුම්බක ප්රවාහයන් ස්පන්දන, ටොබ්ටෝ ලෙස පෙනේ. පශ්චාත් ගබඩාවෙන් පළිගන්න. ට්රාන්ස්ෆෝමර් DT1, DT2 වල බර සහ ප්රමාණයේ දර්ශක මත යැපීම දක්වා නිෂ්පාදනය කිරීම අවශ්ය වන අතර, එපමනක් නොව, පටු කඳුරැල්ලේ අනෙකුත් ප්රභේද සමඟ යුගල වශයෙන්, මෙහි එකක් වෙනුවට ට්රාන්ස්ෆෝමර් දෙකක් අවශ්ය වේ.
විස්තර
- නව PWM කාර්යයන් කට්ටලයක්
- හැරෙන හෝ හැරෙන Outlet strum, සම පිටවන 200mA
- රොබෝවරයාට ද්වි-පහර හෝ තනි පහර ආකාරයෙන් වැඩ කළ හැකිද?
- ද්විත්ව ආවේගයන් යටපත් කිරීම සඳහා යෝජනා ක්රමයක් හඳුන්වා දෙන ලදී
- පුළුල් පරාසයක නියාමනය
- ප්රතිදාන යොමු වෝල්ටීයතාව 5V +-05%
- සමමුහුර්තකරණය හුදෙක් සංවිධානය කර ඇත
Vytchiznyany ඇනෙලොග්: 1114EU3 / 4.
TL493/4/5 ක්ෂුද්ර පරිපථ, ද්විතියික ආයු (IVP) හරය ඉහළ නැංවීම සඳහා විෙශේෂෙයන් නිර්මාණය කර ඇති අතර, IVP පාලන පරිපථ නිර්මාණය කරන විට ධාරිතාව පුළුල් කිරීමට සිල්ලර වෙළෙන්දාට හැකියාව ලබා දේ. ඇමුණුම් TL493/4/5 හි අවදි කිරීමේ ස්විචයක්, නියාමනය සඳහා උත්පාදක යන්ත්රයක්, මිය ගිය කාල නියාමනය සඳහා සංසන්දකයක්, පාලන ප්රේරකයක්, 5V නිරවද්ය ION සහ ප්රතිදාන අදියර සඳහා පාලන පරිපථයක් ඇතුළත් වේ. සමාවේ ලයිටරය පෙනෙන්නේ –0.3...(Vcc-2) පරාසයේ ඉන්-ෆේස් වෝල්ටීයතාවයක් ලෙසිනි. මිය ගිය පැය නියාමනය කිරීම සඳහා වන සංසන්දකය 5% ක පමණ අවම මරණ කාල නිරවද්යතාව අතර මෙන් ස්ථිරවම මාරු කළ හැකිය.
නිමැවුම් සඳහා අතිරේක සම්බන්ධතාවයක් සඳහා සාදන ලද උත්පාදක යන්ත්රයේ සමමුහුර්තකරණයට ඉඩ දෙනු ලැබේ ආර්වෙත යොමු වෝල්ටීයතාවයේ ප්රතිදානය සහ ආදාන කියත් වෝල්ටීයතාව සැපයීමට පෙර ඩබ්ලිව්සමමුහුර්ත රොබෝ kіlkoh පන්දුව ඉස්කුරුප්පු යෝජනා ක්රම සමග scho vykoristovuetsya. ට්රාන්සිස්ටර මත ස්වාධීන නිමැවුම් හැඩගැන්වීමේ යන්ත්ර මඟින් උණුසුම් විමෝචකයක් සහිත පරිපථයට පිටුපසින් හෝ විමෝචක පුනරාවර්තකයේ පරිපථයට පිටුපසින් ප්රතිදාන කඳුරැල්ල ක්රියාත්මක වීමේ හැකියාව සහතික කරයි. TL493/4/5 ක්ෂුද්ර පරිපථවල ප්රතිදාන අදියර අතිරේක විශේෂ ආදානයක් සඳහා මාදිලියක් තෝරා ගැනීමේ හැකියාව සමඟ තනි චක්ර හෝ ද්විත්ව චක්ර ආකාරයෙන් ක්රියා කරයි. සම පාලනය කිරීම සහ ද්වි-පහර මාදිලියට ද්විත්ව ආවේගයක් ලබා දීම වැළැක්වීම සඳහා යෝජනා ක්රමයක් සකස් කර ඇත. උපසර්ගය සෑදිය යුතු දේ ගැලපෙන්න එල්, උෂ්ණත්ව පරාසයේ -5 ... 85C හි සාමාන්ය ක්රියාකාරිත්වය සහතික කිරීම, C උපසර්ගය සමඟ 0 ... 70C උෂ්ණත්ව පරාසය තුළ සාමාන්ය ක්රියාකාරිත්වය සහතික කරයි.
TL494 හි ව්යුහාත්මක රූප සටහන
Visnovki ස්ථානගත කිරීම

පරාමිතිවල අගයන් සීමා කරන්න
ජීව වෝල්ටීයතාවය 41V
බල සැපයුම් ආදාන වෝල්ටීයතාවය (Vcc+0.3)
එකතුකරන්නාගේ ප්රතිදාන වෝල්ටීයතාවය 41V
බාහිර ස්ට්රම් එකතු කරන්නා 250mA
1W නොනවතින මාදිලියේ රෝස අධි තාපනය කිරීමේ බලය
අතිරික්ත හරයේ වැඩ කරන උෂ්ණත්ව පරාසය:
Z උපසර්ගය L -25..85C
С..0..70С උපසර්ගය සමඟ
ගබඩා කිරීමේ උෂ්ණත්ව පරාසය -65...+150C
රොබෝවරුන් පිළිබඳ විස්තරය
TL494 microcircuit යනු ස්පන්දන අනතුරු ඇඟවීමේ ඔරලෝසුවක PWM-පාලකයක් වන අතර එය ස්ථාවර සංඛ්යාතයක් මත ක්රියාත්මක වන අතර එයට අවශ්ය සියලුම බ්ලොක් ඇතුළත් වේ. කියත් වැනි වෝල්ටීයතාවයේ උත්පාදක යන්ත්රය R සහ Z බාහිර සංරචක දෙකකට වඩා ස්ථාපනය කර ඇති සංඛ්යාතය කම්පනය කරන විට. උත්පාදකයේ සංඛ්යාතය සූත්රය මත රඳා පවතී: F osc \u003d 1.1 / R * C
නිමැවුම් ස්පන්දනවල පළල මොඩියුලය ධාරිත්රකයට යොදන ධනාත්මක කියත් වෝල්ටීයතාවයෙන් ළඟා වේ. ඩබ්ලිව්විවිධ සංඥා දෙකක් සමඟ (div. timchasov රූප සටහන). ABO-NOT zabjuє ප්රතිදාන ට්රාන්සිස්ටරවල තාර්කික මූලද්රව්ය Q1і Q2ප්රේරක ප්රේරකයේ ඔරලෝසුවේ රේඛාව ඇතුලේ නම් පමණි අඩුතාර්කික බවට පත් වේ. කියත් වැනි වෝල්ටීයතාවයේ විස්තාරය පාලනය කළ යුතු සංඥා වල විස්තාරය වඩා වැඩි නම් එය පැයක් පමණක් පැවතිය යුතුය. එසේම, පාලනය කළ යුතු සංඥා වල විස්තාරය වෙනස් වීම, ප්රතිදාන ස්පන්දනවල පළලෙහි රේඛීය වෙනසක් ඇති කරයි. ඇතැම් සංඥා යටතේ, මිය ගිය පැය (vysnovok 4), pidsilyuvachi සමාව (vysnovki 1, 2, 15, 16) සහ විස්ල්-බ්ලෝවර් (vysnovok 3) හි ලේන්සියේ lansy නියාමනය කිරීමේ යෝජනා ක්රමය මගින් වෝල්ටීයතා කම්පනය වේ.
මිය ගිය පැය රෙගුලාසි සංසන්දකයේ ආදානය 120mV විය හැක, එය ප්රතිදානයේ අවම මිය ගිය පැය සහ උච්ච-උච්ච වෝල්ටීයතා චක්ර ත්රිත්වයේ පළමු 4% අතර වේ. එහි ප්රතිඵලයක් වශයෙන්, වැඩ චක්රයේ උපරිම කාර්යක්ෂමතාවය 96% ක් වන අතර, 13 එතීෙම් පදනම් වී ඇති අතර, එම නඩුවේ 48%, 13 එතුම් සඳහා යොමු වෝල්ටීයතාවයක් යොදනු ලැබේ.
ප්රතිදානය මත මිය ගිය කාලය වැඩි කිරීම සඳහා, ඔබට ආදානය (visnovok 4) මත මිය ගිය කාල නියාමනය 0..3.3V පරාසයක නියත වෝල්ටීයතාවයකට යෙදිය හැකිය. PWM සංසන්දකය උපරිම අගයෙන් නිමැවුම් ස්පන්දනවල පළල නියාමනය කරයි, හැරවුම් සංඥාවේ වෝල්ටීයතාව 0.5 සිට 3.5V දක්වා වෙනස් වුවහොත්, මිය ගිය පැය නියාමනය ශුන්යයට ආදානයේ විභවය මගින් තීරණය වේ. වරදක් pіdsiluvachі pomilіvі mаyut vіdny පරාසයේ INphase සංඥා vід -0,3 සිට (Vcc-2,0) і zchituvannya znaruzhenya naruzhenya හෝ strumu z ප්රතිදාන dzherel සඳහා vikoristovuvatysya හැක. pіdsilyuvachіv සමාව maut ක්රියාකාරී පිටතට එන්න ඉහළවෝල්ටීයතා මට්ටම සහ ඒකාබද්ධ කාර්යය ABO PWM සංසන්දකයේ ප්රතිලෝම නොවන ආදානයට. එවැනි වින්යාසයකදී, ප්රතිදානය සක්රිය කිරීම සඳහා අවම පැයක් අවශ්ය වන ස්විචය, පාලන ලූපයේ ආධිපත්යය දරයි. ධාරිත්රක විසර්ජන පැය ඩබ්ලිව්මිය ගිය කාල නියාමක සංසන්දකයේ ප්රතිදානයේදී ධනාත්මක ස්පන්දනයක් ජනනය වේ, එය ප්රේරකය ඔරලෝසු කර ප්රතිදාන ට්රාන්සිස්ටර අවහිර කරයි Q1і Q2. මේ අනුව, රොබෝ මාදිලියේ ආදානයේදී, සමුද්දේශ වෝල්ටීයතාවයක් යොදනු ලැබේ (visnovok 13), ප්රේරකය ප්රතිවිරුද්ධ අවධියේ (ද්වි-චක්ර මාදිලියේ) ප්රතිදාන ට්රාන්සිස්ටර දෙකක් සෘජුවම පාලනය කරයි, සහ ප්රතිදාන සංඛ්යාතය උත්පාදක සංඛ්යාතයේ අනෙක් භාගයේ වේ. . අවශ්ය උපරිම ක්රියාකාරී චක්රය 50% ට නොඉක්මවන නම්, ට්රාන්සිස්ටර වලට හානි වී ඇති අතර එම අවස්ථාවේදීම වසා දැමුවහොත් බාහිර ආකෘති යන්ත්රය තනි චක්ර ආකාරයෙන්ද ක්රියාත්මක කළ හැක. ට්රාන්ස්ෆෝමරයට අතරමැදි ඩයෝඩයක් සහිත දඟරයක් තිබේ නම්, සංක්රාන්ති ක්රියාවලීන් මැඩපැවැත්වීම සඳහා මාරු කළ යුතු නම්, මෙම මාදිලිය මාරු කිරීම රෙකමදාරු කරනු ලැබේ. තනි චක්ර මාදිලියේ වුවද, ඔබට විශාල ප්රවාහ අවශ්ය වුවද, ප්රතිදාන ට්රාන්සිස්ටර සමාන්තරව ක්රියා කළ හැකිය. ඒ සඳහා ප්රේරකයෙන් ප්රතිදාන සංඥාව අවහිර කරන OTS මෙහෙයුම් මාදිලියේ තේරීමේදී බිමට ආදානය වසා දැමීම අවශ්ය වේ. ප්රතිදාන සංඛ්යාතය උත්පාදකයේ සංඛ්යාතයේ දිශාවටම සමාන වේ.
TL494 ක්ෂුද්ර පරිපථය 5V යොමු වෝල්ටීයතාවයකින් සමන්විත විය හැකිය, පරිපථයේ බාහිර සංරචක ප්රතිස්ථාපනය කිරීම සඳහා 10mA දක්වා ඝෝෂාකාරී වන ස්ට්රම් එකක් තැනීම. යොමු වෝල්ටීයතාවය 0 සිට 70C දක්වා ක්රියාකාරී උෂ්ණත්ව පරාසයෙන් 5% ක වෙනසක් සඳහා ඉඩ සලසයි.
TL494 ක්ෂුද්ර පරිපථය PWM පාලකයක ක්රියාකාරිත්වය ක්රියාත්මක කරන අතර, එපමනක් නොව, එය බොහෝ විට ජීවයේ ද්වි-පහර ස්පන්දන කුට්ටි උත්තේජනය කිරීමට භාවිතා කරයි (ක්ෂුද්ර පරිපථය බොහෝ විට ජීවිතයේ පරිගණක කොටස් වල භාවිතා වේ).
KKD හි ට්රාන්ස්ෆෝමර් ඩ්රයිව් වලදී, මෝටර් රථයේ සහ මානයන්හි වෙනසක්, ප්රතිදාන පරාමිතීන්ගේ ස්ථායිතාව සමඟ ජීවයේ ආවේග කුට්ටි දෘශ්යමාන ලෙස වාතාශ්රය ලැබේ. කෙසේ වෙතත්, HF-සංක්රාන්ති ආධාරයෙන්, එය අවම බරට විශේෂයෙන් ඵලදායී වේ (එය නොමැතිව, බල සැපයුම් ඒකකය ආරම්භ නොවිය හැක).
TL494 හි ව්යුහාත්මක රූප සටහන මේ වගේ.
මල් 1. TL494 බ්ලොක් රූප සටහන
ශරීරයට ඇමුණුමේ දී visnovkіv TL494 පත් කිරීම එසේ විය හැකිය.

මල් 2. TL494 සවි කිරීම් පත් කිරීම

මල් 3. DIP ගොඩනැගිල්ලේ තරු පෙනුම
іnshi vikonannya විය හැක.
එවැනි වත්මන් ඇනෙලොග් දැකිය හැකිය:
1.ප්රතිදාන චිපයේ වැඩිදියුණු කළ අනුවාදය - TL594 සහ TL598 (ආදානයේ ප්රශස්ත නිරවද්යතාවය සහ දත්ත පුනරාවර්තකය වලංගු වේ);
2. රුසියානු නිෂ්පාදනයේ සෘජු ප්රතිසමයන් - K1006EU4, KR1114EU4.
පසුව, ඔබ vishchevikladennogo සිට දැක ගත හැකි පරිදි, microcircuit dosі යල්පැන නොගිය අතර නෝඩ් මූලද්රව්යයක් ලෙස නවීන ජීවන කුට්ටි තුළ ක්රියාකාරීව vikoristovuvatisya හැක.
TL494 හි ජීව ස්පන්දන අවහිර කිරීම සඳහා වූ එක් විකල්පයකි
PSU රූප සටහන පහතින්.

මල් 4. PSU යෝජනා ක්රමය
මෙහිදී, ස්ට්රූමා කම්පනය කිරීම සඳහා ක්ෂේත්ර ක්රියාත්මක ට්රාන්සිස්ටර දෙකක් භාවිතා කරයි (තාප සැපයුමට obv'yazkovo සවි කර ඇත). දුර්ගන්ධය වේගවත් ස්ට්රම් එකක හොඳින් තබා ඇති dzherel ඉදිරිපිට ජීවත් වීම වරදකි. Pidide, උදාහරණයක් ලෙස, TEN 12-2413 හෝ analogue වැනි මොඩියුලර් DC-DC පරිවර්තනයක්.
ට්රාන්ස්ෆෝමරයේ පිටත එතුම් සිට (එය sprat ඒකාබද්ධ කිරීමට හැකි වේ) 34 st ට ආසන්න විය හැක.

මල් 5. තවත් PSU විකල්පයක්
මෙම පරිපථය නියාමනය කරන ලද ප්රතිදාන වෝල්ටීයතාවයක් (30V දක්වා) සහ ධාරාවෙහි බලය සඳහා එළිපත්ත (5A දක්වා) සහිත බල සැපයුමක් ක්රියාත්මක කරයි.
ගැල්වනික් සම්බන්ධතාවයක් ලෙස, පියවර-පහළ ට්රාන්ස්ෆෝමර් භාවිතා වේ. ද්විතියික එතීෙම් (හෝ ද්විතියික වංගු කට්ටලයක්) නිමැවුමේ දී 40V ට ආසන්න විය හැක.
L1 - toroidal throttle. VD1 - Schottky diode, රේඩියේටර් මත ස්ථාපනය කර ඇති අතර, පරිපථයේ පැවරුම්වල කොටස් නිවැරදි කර ඇත.
ප්රතිරෝධක යුගලයක් R9 і 10, මෙන්ම R3 і 4, pіdstroyuvannya සඳහා vikoristovuyutsya "දළ වශයෙන්-නිශ්චිතව" වෝල්ටීයතාවය සහ බලය strumu vіdpovіdno.
VD1 ඩයෝඩයේ ක්රීම් රේඩියේටරය මත, ඔබ දොස් පැවරිය යුතුය:
1.Diodniy ස්ථානය (pіdіyde, උදාහරණයක් ලෙස, KBPC 3510);
2. ට්රාන්සිස්ටරය (vikoristov යෝජනා ක්රමය සඳහා KT827A, ඇනෙලොග් හැකි ය);
3. ෂන්ට් (R12 යෝජනා ක්රමය මත);
4. Throttle (දඟර L1).
අතිරේක විදුලි පංකාවක් පිටුපස ඇති ප්රයිමස් පංකාවක් සමඟ තාප සැපයුම වඩාත් හොඳින් පුපුරවා හරිනු ලැබේ (නිදසුනක් ලෙස, පරිගණකයකින් සෙන්ටිමීටර 12 සිසිලනකාරකයක්).
ස්ට්රෝමා ශක්තිය සහ වෝල්ටීයතාවයේ දර්ශක ඩිජිටල් විය හැකිය (එය වඩා හොඳ සූදානම් කරන්න) හෝ ඇනලොග් (ඔබට පරිමාණය ක්රමාංකනය කිරීමට අවශ්ය වේ).
තුන්වන විකල්පය

මල් 6. BP හි තුන්වන විකල්පය
අවසාන ක්රියාත්මක කිරීමේ ප්රභේදය.


මල් 7. මම ඊතර් පෙනුමක් ගොඩනඟන්නෙමි
TL494 හි ප්රධාන මූලද්රව්ය මත අඩු පීඩනයක් ඇති විය හැකි නිසා, ප්රධාන ට්රාන්ස්ෆෝමරය TR2 පාලනය කිරීමට උපකාරී වන පරිදි, ට්රාන්සිස්ටර T3 සහ 4 ස්ථාපනය කර ඇත, දුර්ගන්ධය හරය ට්රාන්ස්ෆෝමරය TR1 වෙතින් සජීවී වේ (සහ ඉස්කුරුප්පු ට්රාන්සිස්ටර T1 මගින් පාලනය වේ. 2) පාලන කඳුරැල්ල යටතේ ඔබේ ආකාරයේ පිටතට එන්න.
Throttle L5 කහ වළල්ල මත අතින් වංගු කිරීම (හැරීම් 50) මැද ඩාර්ට් 1.5mm).
වඩාත්ම රත් වූ මූලද්රව්ය වන්නේ ට්රාන්සිස්ටර T3 සහ 4, මෙන්ම ඩයෝඩ D15 වේ. දුගඳ රත් කිරීම (bazhano z හමන) මත සවි කිරීම වරදකි.
බට් රේඛාවේ HF-මාරුව තෙතමනය කිරීම සඳහා පරිපථයේදී Throttle L2 ජය ගනී.
TL494 අධි වෝල්ටීයතාවයකින් ක්රියා කළ නොහැකි අය සඳහා, සිලිකන් ට්රාන්ස්ෆෝමරයක් (Tr3 - CE BV EI 382 1189, 9, 500 mA පමණ ප්රතිදානයකදී) ජීවිතය සඳහා භාවිතා වේ.
එවැනි විශාල මූලද්රව්ය සංඛ්යාවක් සඳහා, එකලස් කිරීමේ පරිපථය පහසුවෙන් Z4A නඩුවේ තැබිය හැකිය, කෙසේ වෙතත්, වාතය ගලායාම සහතික කිරීම සඳහා ඉතිරිය එකතු කිරීම අවශ්ය වේ (පංකාව මෘගයා මත තබා ඇත).
නව ලැයිස්තුවමූලද්රව්ය පහතින් සැරිසරන ලදී.
බල සැපයුම් ඒකකය zminny ධාරාවෙහි මිනුමට සම්බන්ධ වන අතර 0-30V පරාසයක නියත වෝල්ටීයතාවයකින් ජීවය සහතික කරන අතර ධාරාවේ බලය 15A ට වැඩි වේ. ධාරාව සහ වෝල්ටීයතා හුවමාරුව අතින් නියාමනය කරනු ලැබේ.




ප්රකාශන දිනය: 22.01.2018
පාඨක අදහස්
- ඔලෙක්සැන්ඩර් / 04.04.2019 - 08:25
ගොනුව මිතුරෙකු සමඟ බෙදා ගත නොහැකිද? ඔබට තැපෑලෙන් කළ හැකිය [ඊමේල් ආරක්ෂිත]
මෙම microcircuit ShІМ සමන්විත වේ - පාලකය සහ සංසන්දනාත්මක රේඛාව, yakі vіdstezhuyut ප්රතිදාන වෝල්ටීයතාවය සහ පිහිටුවීමේ සංඥා P.G. සහ අවශ්ය වන කැස්කැඩ්, ට්රාන්ස්ෆෝමර් සහ ට්රාන්සිස්ටර ස්විචයන්ගෙන් සමන්විත වේ. Yak PWM - පාලක vikoristovuetsya - microcircuit TL494 (TL493, TL495) සමාගම් TEXAS උපකරණ හෝ ඇනලොග් - microcircuit MPC494 සමාගම් NEC. පැරණි පෙනුම සහ අභිජනනය fig හි ඉදිරිපත් කර ඇත. 1a, TL494 හි ව්යුහාත්මක රූප සටහන Fig.2 හි පෙන්වා ඇත.
මල් එක

මල් 2
+7 සිට 40V දක්වා පරාසයක 12 n_zhku වෝල්ටීයතා සැපයුම සඳහා එම කාල සීමාව තුළ ІС දියත් කෙරේ.Visnovki 1 සහ 2 - අවදි කිරීමේ ඇමතුමක සංඥාවේදී අවදි කිරීමේ ඇමතුමක් සඳහා ප්රතිලෝම සෘජු සහ ප්රතිලෝම ආදානය, vysnovki 4 - "මළ කලාපයේ" ආදාන නියාමනය (සම්පූර්ණ පැය, එය අමනාප වී ඇත්නම්, ට්රාන්සිස්ටර ක්ෂුද්ර පරිපථය උපරිම ආතතියකින් වසා ඇත) 6 (Rт) කියත් වැනි වෝල්ටීයතාවක අභ්යන්තර උත්පාදකයේ ප්රධාන මූලද්රව්ය සම්බන්ධ කිරීමට සේවය කරයි, visnovok 7 - ගැල්වනයිස් කරන ලද, visnovka 8 і 9 - පළමු ට්රාන්සිස්ටරයේ එකතු කරන්නා සහ විමෝචකය, visnovka 11 і 10 - වෙනත් ට්රාන්සිස්ටරයක එකතු කරන්නා සහ නාලිකා විමෝචකය, රොබෝ මාදිලිය සඳහා visnovok 12 1 තේරීම (එක හෝ ද්වි-පහර රොබෝ මාදිලිය). මෙම එතීෙම් මත 2.4 ... 5 ක ධනාත්මක වෝල්ටීයතාවයක් තිබේ නම් (TTL පරිපථ සඳහා තාර්කික "1") - ද්වි-පහර මෙහෙයුම් ආකාරයක් සක්රිය කර ඇත, ට්රාන්සිස්ටර Q1 සහ Q2 රේඛාව ඔස්සේ වක්ර වේ, ස්පන්දන එකකට යයි අදියර එකින් එක කාලය. මෙම හේතුව නිසා, වෝල්ටීයතාව 0 ... 0.4 V (TTL සඳහා තාර්කික "0" - පරිපථ සඳහා) සැකසිය යුතුය - තනි චක්ර මාදිලිය, ඔබේ ට්රාන්සිස්ටරය සමඟ සමාන්තරව විශාල ප්රතිදාන ප්රවාහයක් සක්රිය කළ හැකිය. Visnovok 14 - සමුද්දේශ වෝල්ටීයතාවයේ ස්ථායී ජැක් වෙතින් යොමු වෝල්ටීයතාවයේ (+5) ප්රතිදානය; ШІМ - පාලකය ස්ථාවර සංඛ්යාතයකින් ක්රියා කරන අතර කියත්-දත් වෝල්ටීයතාවක උත්පාදක යන්ත්රය ප්රතිස්ථාපනය කරයි, එමඟින් බාහිර සංරචක දෙකක සංඛ්යාතය පමණක් සැකසීමට හැකි වේ - ප්රතිරෝධක Rt සහ ධාරිත්රකය St. උත්පාදන සංඛ්යාතය පහත සූත්රයට පවරා ඇත:
t=1.1/RtSt
ක්ෂුද්ර පරිපථ ගබඩාවට ඇතුළු වන ක්රියාකාරී නෝඩ් පිටුපසින්, ඔබට එය ප්රතිසම කොටසක් සහ ඩිජිටල් එකක් බවට බෙදිය හැකිය.
ඇනලොග් කොටසට පෙර, කෙනෙකුට සමාව දැකිය හැකිය ඩීඒ 3, ඩීඒ1.
- සංසන්දනය කරන්නන් DA 1, DA2
- කියත් ආකාරයේ වෝල්ටීයතා උත්පාදක යන්ත්රය ඩී.ඒ6
- අතිරේක ජෙරෙලා DA5, DA7, DA8
බාහිර ට්රාන්සිස්ටර ඇතුළු අනෙකුත් සියලුම මූලද්රව්ය ඩිජිටල් කොටස සෑදෙයි.
අත්තික්කා පෙන්වා ඇති ඔරලෝසු රූප සටහන් 3 ක්. 3 බාහිර ආවේගයන්ගේ පෙනුමේ අවස්ථා, පාලනය කළ යුතු දේ මෙන්ම ඒවායේ ත්රිත්වය ද තාර්කික මූලද්රව්යයේ ප්රතිදානය බවට පත් වන බව දැකිය හැකිය. ඩීඩී1. Reshta logic vikonu පමණක් අතිරේක කාර්යය, නිමැවුම් ආවේගයන් නාලිකා දෙකකට බෙදීම. අමනාප වූ ට්රාන්සිස්ටර තිබීම, ඒවාට එකතු කරන්නා සහ විමෝචකය විවෘත කළ හැකිය, එවිට ඔබට ඒවා වයරයට සම්බන්ධ කළ හැකිය. දිලිසෙන විමෝචකයෙන් මාරු වූ විට, ප්රතිදාන ආවේගයන් විකි මගින් ධනාත්මක දිශාවකට පහළට යොමු කෙරේ. Æz ඉහළට විකි සමඟ උණුසුම් එකතු කරන්නෙකු. ඩීඩී 2 - ද්වි-පහර ගතිකඩී- ප්රේරක යෝග ක්රියා මූලධර්මය පාදයේ. ඩීඩී 1 එහි සෘණ දාරය සමග, flip-flopඩීඩී2 සහ ක්රියාත්මක වන එක් කාල පරිච්ඡේදයක් තුළ පැමිණෙන ආවේග දෙකක පෙනුම අක්රිය කිරීමට, ඉදිරියට යන ආවේගයේ නාලිකාව වෙනස් කරන්න.
ඩිජිටල් කොටස.
ඩිජිටල් පථයේ එක් කාල පරිච්ඡේදයක වැඩ බලමු (div. Fig. 3.) අපි නිමැවුම් වලින් එකක් ගනිමු. DD 2 බට් Q є තාර්කික එකක් සහ අනෙක් පැත්තෙන් /ප්රශ්නය තාර්කික ශුන්ය, විටෙක නිමැවුම් දෙකෙහිමඩීඩී 3 තනියම එල්ලෙන්න, ඒවගේම එලියට යන ගමන්ඩීඩී 5 තාර්කික ශුන්යයක් වනු ඇත, මන්ද මාර්ගයෙන් පිටතඩීඩී 5 ඇතුල්වීම් දෙකේදීම ඔබට එකක් ගත හැක්කේ එක් වරක් පමණිඩීඩී 5 ශුන්යව සිටින්න. ඇයි ට්රාන්සිස්ටරය VT5 වසා දමනු ඇත. ස්ටැන් පිටවීම ඩීඩී 4 තාර්කික ශුන්යයක් වනු ඇත, එය ආදාන වලින් එකකට පැමිණේඩීඩී6, මේ අනුව පහළ නාලිකාව හරහා ආවේගය ගමන් කිරීමේ හැකියාව සහතික කරයි. Vihіdniy ආවේගයන් ට්රාන්සිස්ටර මත දිස්වේ VT මූලද්රව්යයේ ප්රතිදාන ස්පන්දන අතර 2 pіd h විරාමයක්ඩීඩී 1. (පිටතට යන විට පැයකට tobtoඩීඩී 1 є ශුන්ය අන්තරාල රූප සටහන් t1-t2) මූලද්රව්යයේ ආක්රමණශීලී බාහිර ආවේගයේ ස්පාඩික්ස් DD 1 (මොහොත ටී 2 රූප සටහන්) ක්ෂුද්ර පරිපථයේ ඩිජිටල් මාර්ගයේ මූලද්රව්ය තත්ත්වය වෙනස් නොකරන්න, අපරාධ මූලද්රව්යයඩීඩී 6, එහි ප්රතිදානයේදී තාර්කික ශුන්යයක් දිස්වේ, එයට ට්රාන්සිස්ටරය VT2 සමීපයි. පිටවීමේ ස්පන්දනයේ අවසානය DD1 (මොහොත t3) පැතිකඩෙහි පිටවීමේ මෝල DD2 වෙනස් කිරීම විශාලනය කරයි. එබැවින්, ප්රතිදාන මූලද්රව්ය DD3, DD4 ශ්රේණිය වෙනස් වනු ඇත. ඉහළ නාලිකාව දිගේ ප්රතිදාන ආවේගය ගමන් කිරීම විශාලනය කිරීමට DD1 ප්රතිදානයේදී ආරම්භ වූ විරාමයක්. මේ ආකාරයෙන්, රොබෝ ඩිජිටල් මාවතේ ප්රධාන අදහස පදනම් වී ඇත්තේ පිටතට යන ස්පන්දනයේ ත්රිත්වය තීරණය වන්නේ පිටතට යන ස්පන්දන DD1 අතර විරාමයේ ත්රිත්ව බව මත ය. ක්ෂුද්ර පරිපථ තාර්කික එකමුතුවක් ලබා දෙයි, එවිට ට්රාන්සිස්ටර VT1і VT2 අර්ධ කාල පරිච්ඡේදයක් සඳහා එක් අදියර අසාර්ථක වීම සඳහා එකින් එක යයි. චක්ර දෙකක පරිපථයක් පිටුපස රොබෝ BP vikonan වැනි එවැනි රොබෝ මාදිලියක් එම නඩුවේදී ජයග්රාහී වේ. 13 තාර්කික ශුන්යයක් යෙදූ වහාම, ක්ෂුද්ර පරිපථ මූලද්රව්ය DD3 සහ DD4 අවහිර කරනු ලැබේ, එනම්. ඔවුන්ගේ පිටවීමේ කඳවුර වෙනස් නොවේ. නිමැවුම් ස්පන්දන අදියර ප්රමාදයකින් තොරව අනුගමනය කරයි. තනි චක්ර පරිපථයක් පිටුපස vikonan හි සජීවී කොටසෙහි බල කොටස මෙන් එවැනි මෙහෙයුම් ආකාරයක් ජයග්රාහී වේ. එකතු කරන්නා සහ ට්රාන්සිස්ටර විමෝචකය එවැනි ක්රියාත්මක කිරීමත් සමඟ ඒවා විස්තාරණය කිරීමේ ක්රමයක් සමඟ සම්බන්ධ වේ.
ඇනලොග් කොටස.
කඳවුරු නිමැවුම් DD1 සංසන්දනාත්මක PWM DA2 රූප සටහන 4 හි ප්රතිදාන සංඥාවට පවරා ඇති අතර එය DD1 යෙදවුම් වලින් එකකට යා යුතුය. PWM comparator DA2 හි ප්රතිදාන සංඥාව පුළුල් බැවින් DD1 හි එක් ආදානයකට යන DA1 සංසන්දනයෙහි ප්රතිදාන සංඥාව (රූප සටහන 2) සාමාන්ය ක්රියාකාරිත්වයට නොයනු ඇත. ඊට අමතරව, සංසන්දකයේ සෘජු ආදානයට සමාන වෝල්ටීයතාව වෙනස් කිරීමේදී එය දැකිය හැකිය ඩී.ඒ 2 ප්රතිදාන ස්පන්දනවල පළල සමානුපාතිකව වෙනස් වේ. සාමාන්ය ප්රකාරයේදී, ආදානයේ වෝල්ටීයතා මට්ටමඩී.ඒ 2 සමාව කඳවුරට වඩා අඩු vynachaetsyaඩී.ඒ 3, නිසා එය වෝල්ටීයතාව මාරු කරයිඩී.ඒ4. එබැවින්, ප්රතිලෝම සම්බන්ධකයේ සංඥාව 1 වන පහළ ක්ෂුද්ර පරිපථයට යොදන විට, PWM සංසන්දකයේ ආදානයේ වෝල්ටීයතා මට්ටම වෙනස් වේ. ඔරලෝසු රූප සටහන් වලින්, නිමැවුම් ස්පන්දනවල පළල බව පැහැදිලිය ඩී.ඒ 2 වෙනස් කිරීමට කිසියම් හේතුවක් තිබේ නම්, පාලනය "මළ කලාපයේ" සංසන්දකයා වෙත මාරු කරනු ලැබේ.ඩී.ඒ 1. ක්ෂුද්ර පරිපථයේ කාර්යයේ වඩාත්ම ආරක්ෂිත මොහොත වන්නේ සෘජු ආදානයේ මොහොතයිඩී.ඒ1 එල්ලෙන විභවය, එනම් "0". සහ tse යන්නෙන් අදහස් කරන්නේ ප්රධාන ආවේගයන් ප්රායෝගිකව එකින් එක යන බවයි. ඒ සඳහා, "ට්රාන්සිස්ටර නැවතුම්පළේ බිඳවැටීම" යන නම යටතේ මට දොස් පැවරිය හැකිය, එක් ට්රාන්සිස්ටරයක් තවමත් වසා නොමැති නම් සහ අනෙක දැනටමත් අසාර්ථක වී තිබේ නම් තත්වය. මෙම ස්ථානයේ ස්ට්රම් යනු බල ට්රාන්ස්ෆෝමරයේ ප්රාථමික සුළං වන අතර ප්රායෝගිකව රිම් නොමැත. මෙම තත්වයේ ප්රතිවිපාක, රීතියක් ලෙස, ඩයෝඩ සෘජුකාරකයේ ෆ්රෙට් අසමත් වීම මෙන්ම ඉන්වර්ටරයේ බල යතුරු වල ෆ්රෙට් අසමත් වීම කණගාටුදායක ය. මෙම අරමුණු සඳහා, යෝජනා ක්රමයට පෙර, අභ්යන්තර වෝල්ටීයතා සොකට් ඇතුළත් විය ඩී.ඒ7 (0.1).
(TDA1555 නොවේ, නමුත් වඩා බරපතල ක්ෂුද්ර පරිපථ), බල සැපයුම බයිපෝල ආහාරයට බාධා කළ හැකිය. තවද මෙහි නැමීම UMZCH නිසා නොව, දිගුව සඳහා වන අතර එමඟින් වෝල්ටීයතාව අවශ්ය මට්ටමට වැඩි කරයි, ආතතියට හොඳ ප්රවාහයක් සම්ප්රේෂණය කරයි. Tsey peretvoryuvach є naivazhchoyu ස්වයං සොරකම් podsilyuvacha කොටසක්. කෙසේ වෙතත්, ඔබ සියලු නිර්දේශ අනුගමනය කරන්නේ නම්, ඔබට ලබා දී ඇති යෝජනා ක්රමය අනුගමනය කරමින්, PN හි සංශෝධන තෝරා ගත හැකිය, එහි යෝජනා ක්රමය පහත දැක්වේ. වැඩිදියුණු කිරීමට - ඒවා මත ක්ලික් කරන්න.
පරිවර්තනයේ පදනම විශේෂ විස්තාරණ ක්ෂුද්ර පරිපථ සඳහා ආවේගයන්, ආවේගයන් උත්පාදක යන්ත්රයකි. උත්පාදන සංඛ්යාතය ප්රතිරෝධක R3 අගය අනුව සකසා ඇත. ඔබට її වෙනස් කළ හැකිය, රොබෝ සහ KKD හි හොඳම ස්ථාවරත්වය වැඩි කිරීම. TL494 මයික්රොචිපයේ ඇමුණුම් වාර්තාව දෙස බලමු.
TL494 චිප පරාමිතීන්
Upit.microcircuits (visnovok 12) - Upit.min=9V; Upit.max = 40V
ආදාන DA1, DA2 හි අවසර ලත් වෝල්ටීයතාවය Upit/2 ට වඩා වැඩි නොවේ
ප්රතිදාන ට්රාන්සිස්ටර Q1, Q2 හි අවසර ලත් පරාමිතීන්:
Unus 1.3V ට වඩා අඩුය;
Uke 40V ට අඩු;
Ik.max 250mA ට අඩු
නිමැවුම් ට්රාන්සිස්ටරවල එකතු කරන්නා-විමෝචකයේ Zalishkova වෝල්ටීයතාවය 1.3V ට වඩා තුන් ගුණයකින් වැඩි වේ.
මම microcircuit මගින් නැවත සකස් කරමි - 10-12mA
රෝස මල් වල පිළිගත හැකි තද බව:
පරිසර උෂ්ණත්වය +25C දී 0.8W;
පරිසර උෂ්ණත්වය +70C දී 0.3W.
ට්රොච් හි බිල්ට් ඔස්කිලේටරයේ සංඛ්යාතය 100 kHz ට වඩා වැඩිය.

- උත්පාදක කියත් වැනි වෝල්ටීයතාව DA6; සංඛ්යාතය තීරණය වන්නේ ප්රතිරෝධකයේ සහ ධාරිත්රකයේ අගයන් මගිනි, 5 වන සහ 6 වන හැරීම් වලට සම්බන්ධ වේ;
- dzherelo පිටත ප්රතිදානය (visnovok 14) සිට ස්ථාවර වෝල්ටීයතා DA5 සහාය;
- DA3 වික්රියාව සඳහා pіdsilyuvach සමාව;
- pіdsilyuvach සමාව සංඥා zamezhennya strumu DA4;
- විවෘත එකතුකරන්නන් සහ විමෝචක සහිත ප්රතිදාන ට්රාන්සිස්ටර දෙකක් VT1 සහ VT2;
- සංසන්දනාත්මක "මළ කලාපය" DA1;
- PWM comparator DA2;
- 2 - DD2 මගින් rozpodіlu සංඛ්යාතයේ මාදිලියේ ගතික ද්වි-පහර D-ප්රේරකය;
- අතිරේක තාර්කික මූලද්රව්ය DD1 (2-ABO), DD3 (2nd), DD4 (2nd), DD5 (2-ABO-NOT), DD6 (2-ABO-NOT), DD7 (NOT);
- 0.1V DA7 නාමික අගයක් සහිත dzherelo නියත වෝල්ටීයතාවය;
- 0.7 mA DA8 නාමික අගයක් සහිත dzherelo stoyny strumu.

Rozgoduyut navantazhennia (බලය ට්රාන්ස්ෆෝමර්) ක්ෂේත්රයේ ට්රාන්සිස්ටර IRFZ44N. ජීවයේ පරිගණක බ්ලොක් සිට සෙන්ටිමීටර 2 ක විෂ්කම්භයක් සහිත ෆෙරයිට් වළල්ලක් මත Throttle L1 එතුම්. Vіn m_stit 10 හැරවුම් 1 mm විෂ්කම්භයක් සහිත ද්විත්ව වයර්, සම්පූර්ණ වළල්ල දිගේ ශාඛාවක් ලෙස. ඔබට මුද්දක් නොමැති වුවද, යෝගය මිලිමීටර් 8 ක විෂ්කම්භයක් සහ සෙන්ටිමීටර කිහිපයක් (විවේචනාත්මක නොවේ) සහිත ෆෙරයිට් කතුරක් මත තුවාල කළ හැකිය. Baby pay at Lay format - zavantazhte in .

අපි ඉදිරියට යමුට්රාන්ස්ෆෝමරය නිවැරදිව සකස් කිරීම හේතුවෙන්, පරිවර්තන ඒකකයට බොහෝ වැඩ කිරීමට සිදු වේ. 40 * 25 * 11 mm ප්රමාණයෙන් යුත් 2000NM සන්නාමයේ ෆෙරයිට් වළල්ලක් මත වින් තුවාල කර ඇත. සියලුම දාර ගොනුවකින් වට කරන්න, ලිනන් ටේප් එකකින් ඔතා. ප්රාථමික වංගු කිරීම මිටියක් සමඟ තුවාල වී ඇති අතර එය 0.7 mm ඝණකමකින් සහ 2 * 6 හැරීම්, tobto 12. 5 cores සහිත හර 5 කින් සමන්විත වේ. visnovkas මත ඔවුන් විකෘති ලෙස ජීවත් විය. වළල්ලේ නිදහස් වංගු කොටසක් මත දහඩිය දමමු, අපි එම ශ්රේණියේ ප්රාථමික වංගු වලින් තවත් අඩක් වංගු කිරීමට පටන් ගනිමු. අපි සමාන වංගු දෙකක් ගන්නෙමු. ඊට පසු, එය විදුලි ටේප් එකකින් වළල්ල වටා ඔතා ඇති අතර, අපි පළමුවැන්නා මෙන් 1.5 mm 2 * 18 හැරීම් කම්බියකින් ද්විතියික වංගු කරන්නෙමු. පළමු ආරම්භයේදී කිසිවක් දැවී නොයන ලෙස, ඔබ එය සමේ උරහිස් 100 Ohm ප්රතිරෝධක හරහා සක්රිය කළ යුතු අතර, ප්රාථමික ට්රාන්ස්ෆෝමරය වොට් 40-60 ලාම්පුවක් හරහා සහ vipadkovy සමාව සඳහා සියල්ල හොඳ වනු ඇත. කුඩා අතිරේකයක්: පෙරහන් බ්ලොක් එකේ යෝජනා ක්රමයේ කුඩා දෝෂයක් ඇත, c19 r22 හි විස්තර මෙහෙයුම් මගින් මතක තබා ගනී, එබැවින් අදියර oscilloscope මත ඔතා ඇති විට, සංඥා විස්තාරය නිවා දමනු ලැබේ. Zagal tsey peretvoryuvach naprugi, scho pіdvischuє, ඔබ නිර්භීතව පුනරාවර්තනය සඳහා නිර්දේශ කළ හැක, ඒ නිසා සාර්ථකව zіbraniya vіn buv දැනටමත් ගොඩක් radioamators.