บทความจัดทำขึ้นจากหนังสือ A.V.
เคอรุชา ไมโครเชมา TL494
ที่ DBZh ปัจจุบัน สำหรับการกำหนดสปริงของการผสมทรานซิสเตอร์ที่ตึงเครียด คุณสามารถใช้ไมโครเซอร์กิตแบบบูรณาการพิเศษ (ICC) ได้
IMC ในอุดมคติสำหรับการรักษาความปลอดภัยให้กับแหล่งจ่ายไฟของหุ่นยนต์ปกติในโหมด PWM นั้นมีความผิดเนื่องจากความยินดีอย่างยิ่งของจิตใจที่ต่ำกว่า:
ถั่วงอกทำงานไม่เหนียว 40V;
การปรากฏตัวของ dzherel ที่ทนความร้อนได้สูงของกระดูกสันหลังส่วนรองรับ
การปรากฏตัวของเครื่องกำเนิดแรงดันไฟฟ้าเหมือนเลื่อย
การรักษาความปลอดภัยความเป็นไปได้ของการซิงโครไนซ์กับสัญญาณซอฟต์สตาร์ทที่ตั้งโปรแกรมไว้
การแสดงสัญญาณของความรู้สึกไม่สบายด้วยความดันในเฟสสูง
การปรากฏตัวของเครื่องเปรียบเทียบ PWM;
แรงกระตุ้น kerovan ทริกเกอร์;
การปรากฏตัวของน้ำตกส่วนหน้าสองช่องจากจากด้านหลังไปข้างหลังจาก KZ;
การสำแดงของตรรกะของการปราบปรามของพัลส์ย่อย;
การปรากฏตัวของการแก้ไขสมมาตรของความชั่วร้าย;
การปรากฏตัวของการดีดในความดันในเฟสที่หลากหลายรวมถึงการดีดตัวในช่วงเวลาของผิวหนังด้วยการเชื่อมต่อในโหมดฉุกเฉิน
การปรากฏตัวของ keruvannya อัตโนมัติพร้อมเกียร์ตรง
zabezpechennya vіdklyuchennya ที่ความดันลดลงของพลัง;
ประเด;
ป้องกันความสับสนจากตรรกะ TTL / CMOS
การรวมและการรวมระยะไกล zabezpechennya
Malunok 11. ควบคุม microcircuit TL494 และซ็อกเก็ตїї
ในคุณภาพของวงจรควบคุมสำหรับคลาส DBZ เป็นไปได้ที่จะมองออกไปตรงกลางขนาดใหญ่ใช้ไมโครเซอร์กิตประเภท TL494CN ซึ่งออกโดย TEXAS INSTRUMENT (USA) (รูปที่ 11) ). Vona ตระหนักถึงหน้าที่ที่แตกต่างกันจำนวนมาก และออกในนามของบริษัทต่างประเทศสำหรับชื่อใหม่ ตัวอย่างเช่น บริษัท SHARP (ญี่ปุ่น) ของการเปิดตัวไมโครเซอร์กิต IR3M02, บริษัท FAIRCHILD (สหรัฐอเมริกา) - UA494, บริษัท SAMSUNG (เกาหลี) - КА7500, บริษัท FUJITSU (ญี่ปุ่น) - MB3759 เป็นต้น Usi ci microcircuits єโดยแอนะล็อกอื่นของ microcircuit คว่ำ KR1114EU4 ง่ายต่อการทำความเข้าใจรายงานไปยังหุ่นยนต์ของไมโครเซอร์กิตกลาง Vona ถูกทำลายเป็นพิเศษเพื่อควบคุมหน่วยพลังงานของหน่วยพลังงานและเพื่อแก้แค้นที่โกดังของมัน (รูปที่ 12):
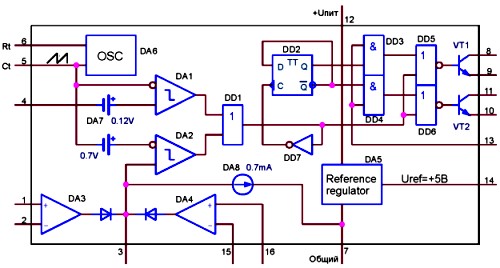
Malunok 12. แผนภาพการทำงาน ІМС TL494
เครื่องกำเนิด pilkopodіbnoy naprugi DA6; ความถี่ DPN ขึ้นอยู่กับตัวต้านทานและตัวเก็บประจุที่ระบุซึ่งเชื่อมต่อกับหน่วยจ่ายไฟที่ 5 และ 6 และในระดับแหล่งจ่ายไฟที่สามารถดูได้สั่นสะเทือนที่ประมาณ 60 kHz;
dzherelo รองรับสปริงที่เสถียร DA5 (Uref = + 5, OB) จากการโทร (visnovok 14);
ตัวเปรียบเทียบ "เดดโซน" DA1;
เครื่องเปรียบเทียบ PWM DA2;
pidsilyuvach pomilki สำหรับฟองน้ำ DA3;
pidsilyuvach pomylki สัญญาณ obmezhennya ดีด DA4;
ทรานซิสเตอร์เอาท์พุทสองตัว VT1 และ VT2 พร้อมตัวสะสมและตัวปล่อยแบบเปิด
D-trigger สองจังหวะแบบไดนามิกในโหมดความถี่ 2 - DD2;
องค์ประกอบลอจิกเพิ่มเติม DD1 (2-ABO), DD3 (2nd), DD4 (2nd), DD5 (2-ABO-NOT), DD6 (2-ABO-NOT), DD7 (NOT);
dzherelo post_yaynoїสปริงเป็นชื่อ 0.1BDA7;
dzherelo post_st_trumu іz nom_ninalom 0.7mA DA8
แผนการควบคุมเปิดตัว tobto ในโอกาสที่ 8 และ 11 จะมีแรงกระตุ้นที่คงอยู่ไปพร้อม ๆ กัน แม้ว่าวันหยุดสุดสัปดาห์จะมีภาษี 12 ค่าก็ตาม ไม่ว่าจะเป็นช่วงชีวิตที่มีระดับอยู่ในช่วงตั้งแต่ +7 ถึง +40 V ได้อย่างชาญฉลาด แบ่งออกเป็นส่วนดิจิทัลและแอนะล็อก (เส้นทางสัญญาณดิจิทัลและแอนะล็อก) ก่อนส่วนอะนาล็อก ควรมี DA3, DA4, DA1, DA2 ตัวเปรียบเทียบ, DA6, DA6 และ DA5, DA7, DA8 เพิ่มเติม ลองตั้งค่าส่วนดิจิทัล (เส้นทางดิจิทัล)
รูปที่ 13 หุ่นยนต์ ІМС TL494 ในโหมดระบุ: U3, U4, U5 - สปริงบนข้อต่อ 3, 4, 5
เส้นทางดิจิทัลเป็นสิ่งที่เข้าใจได้สำหรับหุ่นยนต์ ไดอะแกรมกำหนดเวลาซึ่งอธิบายไมโครเซอร์กิตให้กับหุ่นยนต์นั้นแสดงไว้ในรูปที่ 13. สังเกตได้จากแผนภาพนาฬิกาว่าโมเมนต์ของการปรากฏตัวของอิมพัลส์นอกกรอบของวงจรไมโคร เช่นเดียวกับเรื่องเล็กน้อย (แผนภาพ 12 และ 13) เริ่มต้นด้วยผลลัพธ์ขององค์ประกอบทางลอจิคัล DD1 (แผนภาพ 5) ไม่มี "ตรรกะ" ของ Reshta นอกเหนือจากฟังก์ชันการแบ่งย่อยแรงกระตุ้นเอาต์พุต DD1 ออกเป็นสองช่องสัญญาณ ในเวลาเดียวกันความไม่สำคัญของพัลส์เอาต์พุตของ microcircuit, ความไม่สำคัญของทรานซิสเตอร์เอาท์พุท VT1, VT2 เริ่มต้นขึ้น ดังนั้นเมื่อดูถูกทรานซิสเตอร์สามารถเห็นได้จากตัวสะสมและองค์ประกอบจากนั้นจึงเชื่อมต่อได้ เมื่อเปิดวงจรจากอีมูเลเตอร์ด้านหลังกล่อง จะรู้แรงกระตุ้นจากทรานซิสเตอร์แรงดันสะสมที่นำออกจากกล่อง (จาก 8 และ 11 ไมโครวงจร) และแรงกระตุ้นเองจะถูกควบคุมโดย wikids ลงจากด้านหน้า ทรานซิสเตอร์อีซีแอล (นาฬิกา 9 และ 10 ไมโครเซอร์กิต) ในครั้งเดียว กราวด์ ต่อสายดิน เมื่อวงจรถูกเปิดจากตัวสะสมภายนอก สวิตช์แรงดันไฟภายนอกจะถูกเปิดจนกว่าทรานซิสเตอร์และพัลส์เอาต์พุตจะเชื่อมต่อกับทิศทางทั่วไปของวิกิดขึ้นไป (ด้านหน้าของ VT เป็นพัลส์บวก) คอลเลกชั่นของทรานซิสเตอร์เหล่านี้เชื่อมต่อกับไมโครเซอร์กิตบัส (Upom)
Vyhіdnііnpulsesของvuzlіvที่ใช้งานได้ซึ่งเข้าสู่คลังสินค้าของส่วนดิจิทัลของ microcircuit TL494 กำกับโดย wikids ไปยังเนินเขาจากวงจรของการรวม microcircuit
ทริกเกอร์ DD2 є D-trigger ไดนามิกสองจังหวะ หลักการของ yogo fieldєในการรุก ที่ด้านหน้านำ (บวก) ของแรงกระตุ้นขาออกขององค์ประกอบ DD1 อินพุต D ของทริกเกอร์ DD2 จะถูกบันทึกที่รีจิสเตอร์ภายใน ทางกายภาพ หมายความว่ารายการแรกจากทริกเกอร์ทั้งสองจะถูกโอนย้าย และเมื่อคุณเข้าสู่คลังสินค้า DD2 หากแรงกระตุ้นบนเอาต์พุตขององค์ประกอบ DD1 สิ้นสุดลง ด้านหน้าด้านหลัง (เชิงลบ) ของแรงกระตุ้นนี้จะเปลี่ยนเป็นทริกเกอร์อื่นที่คลังสินค้า DD2 และสถานะของอินพุตเป็น DD2 จะเปลี่ยนไป (ในอินพุต Q มีข้อมูลเกี่ยวกับ อินพุตอ่านออก) เป็นไปได้ที่จะเห็นแรงกระตุ้นบนพื้นฐานของทรานซิสเตอร์ผิวหนัง VT1, VT2 สองครั้งโดยยืดระยะเวลาหนึ่ง ที่จริงแล้ว หากพัลส์ที่อินพุตของทริกเกอร์ DD2 ไม่เปลี่ยนแปลง สถานะของอินพุตจะไม่เปลี่ยนแปลง ในการนั้น พัลส์จะถูกส่งไปยังเอาต์พุตของไมโครเซอร์กิตโดยหนึ่งในแชนเนล เช่น ไปยังแชนเนลบน (DD3, DD5, VT1) หากแรงกระตุ้นที่อินพุตสิ้นสุดลง ทริกเกอร์ DD2 จะสลับ ช่องสัญญาณด้านบนและด้านล่างจะหยุดนิ่ง (DD4, DD6, VT2) นั่นคือแรงกระตุ้นเริ่มต้นที่มาถึงอินพุตและอินพุต DD5, DD6 จะถูกส่งไปยังเอาต์พุตของไมโครเซอร์กิตผ่านช่องสัญญาณด้านล่าง ดังนั้นด้านหน้าเชิงลบของทริกเกอร์ DD2 เปลี่ยนช่องทางของแรงกระตุ้นที่น่ารังเกียจที่ผ่านด้านหน้าเชิงลบ ในทำนองเดียวกัน วัสดุที่มีอยู่ก่อนจะต้องจัดการกับ microcircuit แต่สถาปัตยกรรมของ microcircuit จะป้องกันการปราบปรามของ sub-pulse เพื่อที่จะพูด การเปลี่ยนลักษณะที่ปรากฏของพัลส์สลับสองอันโดยใช้ทรานซิสเตอร์ตัวเดียวและตัวเดียวกันต่อคาบ
ระยะเวลาการรายงานของหุ่นยนต์และเส้นทางดิจิทัลของไมโครเซอร์กิตนั้นสามารถเข้าใจได้
การปรากฏตัวของทรานซิสเตอร์บน (VT1) และด้านล่าง (VT2) ซึ่งปลดล็อกแรงกระตุ้นจาก urahuvannyam ทรานซิสเตอร์เอาท์พุทของช่องบน (VT1) และช่องล่าง (VT2) เริ่มต้นด้วยตรรกะขององค์ประกอบหุ่นยนต์ DD5, DD6 ("ทริกเกอร์เสียงแหลม 2 ตัว DD2.
ตรรกะขององค์ประกอบหุ่นยนต์ 2-ABO-NOT เช่น vidomo, polyagaєในความจริงที่ว่าที่เอาต์พุตขององค์ประกอบดังกล่าวมีระดับพลังงานสูง (ตรรกะ 1) สำหรับ vipad เพียงอันเดียวเช่นเดียวกับอินพุตทั้งสองที่นั่น ต่ำ (ตรรกะ) ... หากมีสัญญาณอินพุตจำนวนมากที่เอาต์พุตขององค์ประกอบ ABO 2 จะไม่มีระดับแรงดันต่ำ (ตรรกะ 0) ถ้าผลลัพธ์ Q ของทริกเกอร์ DD2 เป็นตรรกะ 1 (ช่วงเวลา ti พร้อมไดอะแกรม 5 ในรูปที่ 13) และเอาต์พุต / Q เป็นตรรกะ 0 ดังนั้นตรรกะ 1 และตรรกะ 1 จะปรากฏที่อินพุตทั้งสองของ DD3 (2I) และมีเหตุผล 1 ที่จะปรากฏบนเอาต์พุต DD3 และนี่หมายถึงหนึ่งในอินพุตขององค์ประกอบ DD5 (2ABO-NOT) ของช่องสัญญาณด้านบน นอกจากนี้ทันทีจากสัญญาณก็ควรไปที่อินพุตอื่นขององค์ประกอบจากเอาต์พุตขององค์ประกอบ DD1 จากนั้นเอาต์พุต DD5 จะเป็นตรรกะและทรานซิสเตอร์ VT1 จะสูญหายในค่ายปิด รายการเริ่มต้นสำหรับ DD4 จะเป็นตรรกะ 0 เพราะ ลอจิก 0 มีอยู่ของหนึ่งในอินพุต DD4 ที่เหมาะสมกับ / เอาต์พุต Q ของทริกเกอร์ DD2 ลอจิก 0 จากเอาต์พุตขององค์ประกอบ DD4 ไปที่อินพุตหนึ่งขององค์ประกอบ DD6 เพื่อให้พัลส์สามารถส่งผ่านช่องสัญญาณด้านล่างได้ แรงกระตุ้นทั้งหมดของขั้วบวก (ตรรกะ 1) ปรากฏขึ้นที่อินพุต DD6 และนั่นหมายถึงบนพื้นฐานของ VT2 เป็นเวลาหนึ่งชั่วโมงก่อนที่จะพัลส์เอาต์พุตขององค์ประกอบ DD1 (เป็นเวลาหนึ่งชั่วโมงหากอยู่ที่เอาต์พุต DD1 єตรรกะ 0 - มะเดื่อ ... ด้วยเหตุนี้ ทรานซิสเตอร์ VT2 จะแสดงเป็นตัวรวบรวมวิกิ ซึ่งเป็นแรงกระตุ้นที่วิกิลดลงเป็นค่าบวก (หากเปิดไว้ด้านหลังวงจร จะเป็นอีมูเลเตอร์จากต่างประเทศ)
หูของพัลส์ที่น่ารังเกียจขององค์ประกอบ DD1 (ช่วงเวลา t2 พร้อมไดอะแกรม 5 ในรูปที่ 13) ไม่เปลี่ยนตำแหน่งขององค์ประกอบในเส้นทางดิจิทัลของ microcircuit ยกเว้นองค์ประกอบ DD6 ที่เอาต์พุตซึ่งเป็นตรรกะ 0 ปรากฏขึ้นและทรานซิสเตอร์ VT2 ปิดตัวลง ความสมบูรณ์ของพัลส์เอาต์พุต DD1 (โมเมนต์ตา) ซูมเข้าเพื่อเปลี่ยนเอาต์พุตของทริกเกอร์ DD2 ที่ฝั่งตรงข้าม (ตรรกะ 0 - สำหรับเอาต์พุต Q, ลอจิคัล 1 - สำหรับเอาต์พุต / Q) สิ่งนี้จะเปลี่ยนสถานะของเอาต์พุตขององค์ประกอบ DD3, DD4 (บนเอาต์พุต DD3 - ตรรกะ 0 บนเอาต์พุต DD4 - ตรรกะ 1) มีการหยุดชั่วคราวในขณะนี้! 3 บนเอาต์พุตขององค์ประกอบ DD1 เพื่อซูมเข้าในความสามารถในการแสดงทรานซิสเตอร์ VT1 ของช่องสัญญาณบน ลอจิก 0 ที่เอาต์พุตขององค์ประกอบ DD3 เพื่อ "ยืนยัน" ความเป็นไปได้โดยแปลงเป็นรูปลักษณ์ที่แท้จริงของพัลส์เดี่ยวบนฐานของทรานซิสเตอร์ VT1 พัลส์ทั้งหมดเป็นสามเท่าจนถึงช่วงเวลาที่ U เมื่อ VT1 โค้งและทำซ้ำกระบวนการ
ดังนั้นแนวคิดพื้นฐานของเส้นทางดิจิทัลของหุ่นยนต์ของ microcircuit ของสนามคือความเล็กน้อยของแรงกระตุ้นสัญญาณบน windows 8 และ 11 (หรือบน windows 9 และ 10) เป็นการหยุดเล็กน้อยระหว่างพัลส์ภายนอกของ องค์ประกอบ DD1 Elementi DD3, DD4 เริ่มช่องสัญญาณผ่านสัญญาณพัลส์ ต่ำ rivnyaเมื่อคุณเห็นวิธีการวาดบนเอาต์พุต Q і / Q ของทริกเกอร์ DD2 ซึ่งถูกตัดโดยองค์ประกอบ DD1 เอง Elementi DD5, DD6 єแผนราคาต่ำ
เพื่ออธิบายความเป็นไปได้ในการทำงานของไมโครเซอร์กิต ฉันจะหมายถึงอีกหนึ่งความสำคัญ จามรีสามารถเห็นได้จากแผนภาพการทำงานของเจ้าตัวเล็ก องค์ประกอบอินพุต DD3, DD4 เชื่อมต่อและเปิดใช้งานบน 13 microcircuit หากฟังก์ชัน 13 ได้รับตรรกะ 1 องค์ประกอบ DD3, DD4 จะถูกต้องและทำซ้ำข้อมูลจากอินพุต Q / Q ของทริกเกอร์ DD2 ด้วยชุดองค์ประกอบ DD5, DD6 และทรานซิสเตอร์ VT1 ทั้งชุด VT2 จะถูกเปลี่ยนเฟสโดยครึ่งระยะเวลา ป้องกันไม่ให้หุ่นยนต์ของหน่วยกำลังของ DBZh แจ้งเตือนให้สร้างวงจรสองจังหวะโดยใช้สะพาน หาก visnovok 13 จะได้รับตรรกะ 0 ดังนั้นองค์ประกอบ DD3, DD4 จะถูกบล็อก tobto ประเทศที่ป้อนองค์ประกอบทั้งหมดไม่เปลี่ยนแปลง (ตรรกะถาวร 0) ในการนั้น แรงกระตุ้นขององค์ประกอบ DD1 จะถูกแทรกเข้าไปในองค์ประกอบ DD5, DD6 ในลักษณะเดียวกัน Elementi DD5, DD6, іvyhіdnіทรานซิสเตอร์ VT1, VT2, จะถูกเลื่อนโดยไม่ชักช้าในเฟส (หนึ่งชั่วโมง) vikoristovuyutsya เป็นโหมดไมโครวงจรหุ่นยนต์ในคราวเดียวซึ่งเป็นส่วนหนึ่งของพลังงานของ DBZh vikonan สำหรับวงจรรอบเดียว คอลเลกชั่นและอีมิเตอร์ของทรานซิสเตอร์เอาต์พุตทั้งสองของไมโครเซอร์กิตในทั้งช่วงสามารถใช้ร่วมกับวิธีความรู้สึกได้
จามรี "zhorstka" เป็นตรรกะในวงจรสองจังหวะ
เจเรลภายในของไมโครเซอร์กิต Uref (วงจร 13 ของไมโครเซอร์กิตจะถูกเพิ่มเข้าไปในวงจร 14)
ตอนนี้หุ่นยนต์สามารถจัดการกับเส้นทางแอนะล็อกของไมโครเซอร์กิตได้
เอาต์พุตของ DD1 ถูกตั้งค่าเป็นสัญญาณเอาท์พุตของตัวเปรียบเทียบ PWM DA2 (แผนภาพ 4) ซึ่งไปที่หนึ่งในอินพุตของ DD1 สัญญาณเอาต์พุตของตัวเปรียบเทียบ DA1 (แผนภาพ 2) ซึ่งไปที่อินพุตอื่นของ DD1 ไม่ไหลในโหมดปกติของหุ่นยนต์ไปยังเอาต์พุต DD1 ซึ่งเกิดจากพัลส์เอาต์พุตที่กว้างของ PIM - เครื่องเปรียบเทียบ DA2 .
นอกจากนี้ จากแผนภาพในรูปที่ 13 จะเห็นได้ว่าเมื่อระดับเปลี่ยนไป ความดันที่อินพุต แต่ไม่กลับด้าน PWM ของตัวเปรียบเทียบ (แผนภาพ 3) ความกว้างของพัลส์เอาต์พุตในไมโครเซอร์กิต (แผนภาพ 12, 13) จะเป็นสัดส่วน ในโหมดปกติของหุ่นยนต์ สัญญาณรบกวนที่อินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ PWM DA2 จะปรากฏขึ้นเมื่อปิด DA3 เท่านั้น (เพราะฉันจะเปลี่ยนสัญญาณเมื่อ DA4 แขวนอยู่) 1 วงจรขนาดเล็ก) ทอม เมื่อได้รับสัญญาณ กริ่งบน microcircuit 1 microcircuit ความกว้างของพัลส์ keruyushchy ขาออกจะเปลี่ยนตามสัดส่วนจนกว่าสัญญาณเสียงเรียกเข้าจะเปลี่ยนไปซึ่งจะเปลี่ยนตามสัดส่วนของพญานาคแห่งชีวิตเพราะ เสียงเรียกเข้าจะเริ่มเอง
ชั่วโมงของการหยุดชะงักระหว่างพัลส์ออนบอร์ดบนไมโครเซอร์กิต 8 และ 11 หากความผิดของทรานซิสเตอร์ภายนอก VT1 และ VT2 ถูกปิดเรียกว่า "โซนตาย"
ตัวเปรียบเทียบ DA1 เรียกว่าตัวเปรียบเทียบ "เดดโซน" เนื่องจาก ชนะviznachaєน้อยที่สุดเท่าที่จะเป็นไปได้และไม่สำคัญ ราคาของการบรรยายเป็นที่เข้าใจ
จากแผนภาพนาฬิกาในรูปที่ 13 เมื่อความกว้างของพัลส์เอาต์พุตของตัวเปรียบเทียบ PIM DA2 เปลี่ยนไป ความกว้างของพัลส์ในพัลส์มาตรฐานเอาต์พุตของตัวเปรียบเทียบ DA1 จะถูกแทนที่ด้วย ตัวเปรียบเทียบโดยเริ่มต้นเอาต์พุตขององค์ประกอบตรรกะ DD1 จากเดิมและ ความกว้างของพัลส์เอาต์พุตของไมโครเซอร์กิต ด้วยเหตุผลบางประการ ตัวเปรียบเทียบ DA1 จะเชื่อมต่อความกว้างของพัลส์เอาต์พุตของไมโครเซอร์กิตและค่าสูงสุด ระดับของการเชื่อมต่อโครงข่ายเริ่มต้นโดยศักย์ที่อินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ DA1 (วงจรไมโคร vivedennya 4) ในโหมด เมื่อมันยืนอยู่ อย่างไรก็ตาม ในทางกลับกัน ศักยภาพของเอาต์พุต 4 คือช่วงของการควบคุมละติจูดของพัลส์เอาต์พุตของไมโครเซอร์กิต ด้วยศักยภาพที่เพิ่มขึ้น ช่วง 4 แบนด์จะดังขึ้น ช่วงการควบคุมที่กว้างที่สุดคือ todi หากศักยภาพอยู่ที่เอาต์พุต 4 ถนน 0
อย่างไรก็ตาม ในกรณีของ vynikє nebezpeka มันถูกผูกเข้าด้วยกัน แต่ความกว้างของ "เดดโซน" สามารถเท่ากับ 0 (ตัวอย่างเช่น ในกรณีของ DBZh struma ที่รวมกันขนาดต่างกัน) ซึ่งหมายความว่าkeruyuchіกระตุ้นบนนาฬิกา 8 และ 11 microcircuits และตามด้วยโดยไม่ต้องตรงกลางทีละตัว นั่นอาจเป็นกรณีของสถานการณ์ ราวกับว่าฉันจะเรียกมันว่า "การแยกย่อยตามสไตล์" วอห์นจะอธิบายความเฉื่อยของทรานซิสเตอร์กำลังของอินเวอร์เตอร์ ซึ่งสามารถปรากฏและโค้งงอได้ เพื่อที่ทันทีที่ฐานของทรานซิสเตอร์ปิดได้รับสัญญาณริบหรี่และสัญญาณปลดล็อคจะถูกส่งไปยังฐานของทรานซิสเตอร์ปิด (เพื่อให้มีศูนย์ "โซนตาย") เราจะเห็นสถานการณ์ถ้า ทรานซิสเตอร์ตัวหนึ่งไม่คดเคี้ยว แต่ได้เริ่มขึ้นแล้ว นี่คือการสลายของแรงดันทรานซิสเตอร์บนสะพานซึ่งเป็นขั้วของแรงดันทรานซิสเตอร์ผ่านทรานซิสเตอร์ สามารถเห็นดีด, จามรีได้จากแผนภาพในรูปที่ 5 ของฉันเป็นขดลวดหลักของหม้อแปลงไฟฟ้าและแทบไม่มีการล้อมรอบ Zakhist struma ทันทีไม่ใช่ pratsyu, tk ดีดเซ็นเซอร์ไม่ผ่านเซ็นเซอร์ดีด (ไม่มีข้อบ่งชี้ในแผนภาพ การออกแบบและหลักการของเซ็นเซอร์ดีดที่มีอาการจะรายงานในหัวข้อถัดไป) แต่นี่หมายความว่าเซ็นเซอร์ไม่สามารถมองเห็นสัญญาณไปยังตัวควบคุมได้ วงจร ในการนั้น การดีดที่เล็กที่สุดของการเอื้อมถึงขนาดใหญ่แม้ในช่วงเวลาสั้น ๆ ของชั่วโมง มันสามารถนำไปสู่ความเครียดที่เพิ่มขึ้นซึ่งสามารถมองเห็นได้จากทรานซิสเตอร์กำลังทั้งสองและใช้งานได้จริง (ตามกฎแล้วสลาย) นอกจากนี้ยังสามารถมีชีวิตชีวาด้วยสะพานตรงที่ส่งกำลัง กระบวนการทั้งหมดจะจบลงด้วยเศษของเฮมล็อคซึ่งด้วยพลังงานของมันไม่ได้เพิ่มขึ้นเพื่อทำให้องค์ประกอบของโครงร่างบริสุทธิ์ แต่กีดกันการยึดตาข่ายดั้งเดิม
ทอม เชรุยุชะ นาปูกา; เรียงตามทรานซิสเตอร์กำลังถูกหล่อขึ้นในระดับดังกล่าวเพื่อให้ทรานซิสเตอร์ตัวใดตัวหนึ่งงอขึ้นในทันใดและจากนั้นก็หมุนอีกครั้ง กล่าวอีกนัยหนึ่งระหว่างพัลส์ keruyuchim ซึ่งจ่ายให้กับฐานของทรานซิสเตอร์กำลังนั้นมีความผิดตามนาฬิกาเวลาซึ่งไม่เท่ากับศูนย์ ("โซนตาย") ความไร้สาระของ "เขตมรณะ" นั้นได้รับอนุญาตน้อยที่สุด
สถาปัตยกรรมของไมโครเซอร์กิตช่วยให้ควบคุมค่าของ "เขตมรณะ" ขั้นต่ำสุดเพื่อเพิ่มศักยภาพในการสร้างไมโครวงจร 4 ตัว โอกาสที่จะเริ่มต้นด้วยความช่วยเหลือของตัวแทนการโทรเพื่อเชื่อมต่อกับบัสของการสนับสนุนภายนอกของ jerel การสนับสนุนภายในของ Uref microcircuit
สำหรับ DBZh บางรุ่น จะมองเห็นตัวเรียกเลขหมายดังกล่าว ซึ่งหมายความว่าเมื่อกระบวนการเริ่มต้นที่ราบรื่นเสร็จสิ้น (div. ต่ำกว่า) ศักยภาพของเอาต์พุตของ 4 microcircuits จะยังคงเท่ากับ 1B) ซึ่งเชื่อมต่อกับอินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ DA1 ที่มีขั้วบวก และ การเชื่อมต่อของ 4 microcircuits - ลบ ในอันดับดังกล่าว พนักงานรวมความกว้างของพัลส์เอาต์พุตของตัวเปรียบเทียบ DA1 และนั่นหมายถึงความกว้างของ "เดดโซน" สำหรับจิตใจบางคน ค่านี้ไม่สามารถเท่ากับ 0 ได้ แต่มันหมายถึง "การแยกย่อยตามท่าทาง" จะ จะไม่อร่อยโดยพื้นฐาน กล่าวอีกนัยหนึ่ง สถาปัตยกรรมของไมโครเซอร์กิตนั้นขึ้นอยู่กับการเชื่อมต่อระหว่างกันของเรื่องไร้สาระและแรงกระตุ้นสูงสุด หากมีไมโครเซอร์กิต 4 ตัวเชื่อมต่อกับไมโครเซอร์กิต 4 ตัว เพื่อการเริ่มต้นที่ราบรื่น ศักยภาพของไดรเวอร์ไม่ใช่ 0 ดังนั้นความกว้างของพัลส์ภายนอกของตัวเปรียบเทียบ DA1 ไม่ได้เริ่มด้วยกระบวนการ DA7 ภายในเท่านั้น แต่ ในเวลาเดียวกันดังที่กล่าวกันว่า vishche ช่วงไดนามิกของการควบคุมละติจูดของเสียง PIM เปรียบเทียบ DA2
โครงการเริ่มต้น
รูปแบบการเริ่มต้นใช้งานมีไว้สำหรับ otrimannya naprugi เพื่อให้สามารถจ่ายไฟให้กับไมโครเซอร์กิตได้เมื่อเปิดสวิตช์ IWP ในกริดการทำให้มีชีวิตชีวา ก่อนเริ่มต้น ทอมต้องพึ่งพาการเปิดตัวของหุ่นยนต์ไมโครเซอร์กิตตั้งแต่แรก โดยไม่มีการทำงานปกติของหน่วยกำลังของหุ่นยนต์และวงจรทั้งหมดของ DBZh zagalom
สามารถแจ้งรูปแบบการเริ่มต้นใช้งานได้สองวิธี:
จากความตื่นเต้นในตนเอง
จากไพรมัสสู่ปัญหา
วงจรสำหรับ vikoristovuyutsya ที่ตื่นเต้นในตัวเองเช่นใน DBZh GT-150W (รูปที่ 14) Uep ถูกยืดให้ตรงเพื่อจ่ายลำโพงตัวต้านทาน R5, R3, R6, R4 ซึ่งเป็นพื้นฐานสำหรับทั้งทรานซิสเตอร์สวิตช์ไฟ Q1, Q2 เพื่อที่ผ่านทรานซิสเตอร์ที่ฉีดเข้าไปในความตึงเครียดสรุปบนตัวเก็บประจุ C5, C6 (Uep) ซ่อมแซมดีดฐานกับตะเกียง (+) C5 - R5 - R7 - 6th Q1 - R6 - R8 - 6th Q2 - "ลวดระยะไกล " ของด้านหลัก - (-) C6
ความผิดจะถูกทรานสิสเตอร์โดย cim strum เป็นผลให้ผ่านตัวสะสม - อิมิตเตอร์ของทรานซิสเตอร์ทั้งสอง พวกเขาซ่อมแซม strums ของทรานซิสเตอร์อื่นตามเลน:
ถึง Q1: (+) C5 - บัส +310 V - to-e Q1 - 5-6 T1 -1-2 T2-C9- (-) C5
ผ่าน Q2: (+) C6 - C9 - 2-1 T2 - 6-5 T1 - to-e Q2 - "back wire" ของด้านหลัก - (-) C6

Malunok 14. โครงการเริ่มต้นจาก DBZh GT-150W ที่ตื่นเต้นในตัวเอง
Yakby ทำผิดด้วย strumies ดังนั้นพวกเขาจึงผ่านลูปเพิ่มเติม (เริ่ม) 5-6 T1 ในเกลียวตรงข้าม, ลูกเปตอง, จากนั้นดีดที่เป็นผลลัพธ์จะจมลงใน bi 0 และวงจรไม่สามารถเริ่มต้นได้
อย่างไรก็ตามพลังของการชะลอตัวทางเทคโนโลยีของความจุที่จะแข็งแกร่งกว่าดีดของทรานซิสเตอร์ Q1, Q2 นั้นขึ้นอยู่กับจำนวนดีดมากขึ้นเพราะ ทรานซิสเตอร์จะแสดงในลักษณะที่แตกต่างกัน นั่นคือเหตุผลที่กระแสผลลัพธ์ผ่านเทิร์น 5-6 T1 ไม่แพง 0 และไม่ตรง สมมุติว่ากำลังข้ามการดีดผ่านทรานซิสเตอร์ Q1 (ดังนั้น Q1 อยู่ในโลกที่ใหญ่กว่า ต่ำกว่า Q2) และดีดตัวในกรณีของ bik vid vivedennya 5 ถึง vivedennya 6 T1 Podalshіmіrkuvannya runtuyutsya ลวกทั้งหมด
อย่างไรก็ตาม เพื่อความยุติธรรม ต้องบอกว่าเราสามารถย้ายดีดผ่านทรานซิสเตอร์ Q2 และกระบวนการที่อธิบายไว้เพิ่มเติมทั้งหมดจะถูกวางไว้ก่อนทรานซิสเตอร์ Q2
การดึงดีดผ่านเทิร์น 5-6 T1 wiklikєจะปรากฏ EPC ร่วมกับขดลวดของหม้อแปลงควบคุม T1 เมื่อมี EPC เต็ม (+) winnickєถึง visnovka 4 ถึงอินพุต 5 іไปยังฐาน Q1 จากการไหลของ EPC ที่ฉีดไปยัง dodatkovo strum ซึ่งแสดงตามแลนซ์: 4 T1 - D7-R9-R7 -6-3 Q1 - 5 T1.
หนึ่งชั่วโมงบนvivedennі 7 T1 z'appear (-) EPC schodo vivedennya 8, tobto ขั้วของสายโซ่ EPC ดูเหมือนจะกะพริบสำหรับไตรมาสที่ 2 และเปลี่ยนเป็นม้วนงอ เสียงเรียกเข้าที่เป็นบวกจากระยะไกล (POS) Diya їїpolyagaєในนั้นเมื่อดีดเติบโตผ่าน dilenca, ตัวสะสม-emiter Q1 และเปลี่ยน 5-6 T1 บนขดลวด 4-5 T1 สำหรับ EPC ที่กำลังเติบโต, จามรี, กระพริบดีดฐานเพิ่มเติมสำหรับ Q1 ใน โลกกว้างขึ้น กระบวนการพัฒนาในลักษณะคล้ายหิมะถล่ม (เร็วกว่านั้นอีก) และสร้างการแสดงผลเพิ่มเติมของ Q1 และ Q2 ที่หยุดนิ่ง ผ่านการเหนี่ยวนำ Q1 และขดลวดปฐมภูมิ 1-2 ของหม้อแปลงไฟฟ้าแรงกระตุ้น T2 มันจะซ่อมแซมดีด จากนั้นมีการสร้างเส้นตรง เพื่อให้แรงกระตุ้น EPC ปรากฏขึ้นพร้อมกับขดลวด T2 ทั้งหมด ชีพจรจากขดลวด 7-5 T2 ชาร์จความจุสะสม C22 บน C22 มีสปริง จามรีให้อาหารจามรีที่ให้ชีวิตแก่ 12 microcircuit IC1 ประเภท TL494 และน้ำตก uzgodzhu ไมโครเซอร์กิตเริ่มต้นและสร้างพัลส์กระแสตรง 11, 8 ตัว ซึ่งผ่านน้ำตก (Q3, Q4, T1) เพื่อซ่อมแซมสวิตช์ไฟ Q1, Q2 ในขดลวดทั้งหมดของหม้อแปลงไฟฟ้า T2 มี EPC แรงกระตุ้นในระดับเล็กน้อย ด้วย EPC ทั้งหมดจากขดลวด 3-5 และ 7-5 ทำให้ C22 เปิดใช้งานอย่างถาวร อนุญาตให้ใช้แรงดันที่ไม่สามารถจินตนาการได้ (ใกล้กับ +27V) กล่าวอีกนัยหนึ่ง ไมโครเซอร์กิต ซึ่งอยู่ตามวงแหวนของวงแหวนที่ส่งเสียงกริ่ง จะเริ่มส่งพลังให้กับตัวเอง (แอนิเมชั่นในตัวเอง) เครื่องเข้าสู่โหมดการทำงาน ความเครียดในการใช้ชีวิตของไมโครเซอร์กิตและน้ำตก uzgodzhuvalny นั้นเป็นอีกอันหนึ่งเท่านั้นที่อยู่ตรงกลางของบล็อกและเรียกตัวเองว่าอัปปอม
วงจรนี้สามารถใช้ได้ในหน่วยพัลส์ LPS-02-150XT (ไต้หวัน) สำหรับคอมพิวเตอร์ Mazovia CM1914 (รูปที่ 15) ในตอนเริ่มต้นของวงจรเริ่มต้นสำหรับการพัฒนา ให้ทำตามไดรฟ์ทางเดียว D1, C7 แบบทางเดียวเพิ่มเติม ซึ่งจะจ่ายไฟให้กับขั้วบวกตัวแรกสำหรับฐานสวิตช์ไฟสำหรับกล่องต้านทานสวิตช์ไฟ ฉันจะเร่งกระบวนการเริ่มต้นเพราะ เมื่อคุณเห็นปุ่มใดปุ่มหนึ่ง มันจะเชื่อมต่อขนานกับการชาร์จตัวเก็บประจุ คุณจึงใช้งานได้อย่างราบรื่น มีพลังมหาศาล ในรูปแบบ Inshomu จะมีลักษณะคล้ายกับลักษณะที่ปรากฏ

รูปที่ 15 โครงการเริ่มต้นจากการกระตุ้นตนเองในหน่วยแรงกระตุ้น LPS-02-150XT
โครงการดังกล่าวได้รับชัยชนะ เช่น DBZh PS-200B จาก LING YIN GROUP (ไต้หวัน)
ขดลวดปฐมภูมิของหม้อแปลงเริ่มต้นพิเศษ T1 ถูกเปิดโดยครึ่งหนึ่งของตาข่าย (ที่ 220V เล็กน้อย) หรือบนรีคอยล์ (ที่ 110V เล็กน้อย) เพื่อที่จะรักษาความสงบจากโลก แต่แอมพลิจูดของการเปลี่ยนแปลงของความตึงเครียดบนขดลวดที่สอง T1 ไม่ได้นอนลงไปที่ค่าเล็กน้อยของตาข่าย ผ่านขดลวดปฐมภูมิ T1 ที่มี DBZh ที่ขอบ มีการเปลี่ยนแปลงดีด ในขดลวดที่สอง 3-4 T1 จะเหนี่ยวนำ EPC ไซน์ที่มีความถี่ของตาข่าย ดีดที่ผ่านทางเข้า EPC ถูกยืดให้ตรงด้วยเดรัจฉานพิเศษบนไดโอด D3-D6 และปรับให้เรียบด้วยตัวเก็บประจุ C26 ในรุ่น C26 มีหน่อหลังชีวิตใกล้กับ 10-11V เนื่องจากจามรีจะถูกป้อนไปยังไมโครเซอร์กิต U1 ประเภท TL494 สิบสองวงจรและต่อไปยังน้ำตก ในเวลาต่อมาเพียงเล็กน้อย ควบคู่ไปกับกระบวนการนี้ ประจุของตัวเก็บประจุจะถูกเพิ่มเข้าไปในตัวกรอง ซึ่งมีความเรียบ ในขณะที่จ่ายพลังงานให้กับไมโครเซอร์กิต น้ำตกพลังงานก็ดูเหมือนจะได้รับพลังงานเช่นกัน ไมโครเซอร์กิตเริ่มทำงานและซ่อมแซมเครื่องกำเนิดไฟฟ้าด้วยแรงกระตุ้นโดยตรง 8, 11 หลังชั่วโมง ซึ่งจะผ่านน้ำตกซึ่งจะใช้เพื่อซ่อมแซมปุ่มเปิดปิด เป็นผลให้มีปัญหากับบล็อก อินพุตไปยังโหมดการปรับตัวเองของไมโครเซอร์กิตนั้นดำเนินการจากบัสของแรงดันเอาต์พุต + 12V ผ่านไดโอด D8 ซึ่งเชื่อมต่ออยู่ ดังนั้นจากการปรับตัวเองของ trocha ฉันเปลี่ยนทิศทางของเครื่องหนีบผมตรง D3-D5 จากนั้นไดรเวอร์ของ vypryamlyach เริ่มต้นจะหยุดทำงานหากความผิดปกติไม่ไหลเข้าสู่วงจรหุ่นยนต์
ความต้องการเสียงเรียกเข้าผ่านไดโอด D8 นั้นไม่ได้ถูกมองข้าม ในรูปแบบของ deyakie DBZh, de zastosovuєtsya primus zbudzhennya ลิงก์ดังกล่าวจะออก วงจรขนาดเล็ก keruyucha และน้ำตกซึ่งเป็น uzgodzhu จะถูกขับเคลื่อนโดยเอาต์พุตของ vypryamlyach เริ่มต้นเป็นเวลาหนึ่งชั่วโมง อย่างไรก็ตาม ระดับของพัลซิ่งบนบัส Upom นั้นใหญ่กว่ามาก แต่ไม่ใช่ที่การพัฒนาของไมโครเซอร์กิตจากบัสเอาท์พุต + 12V
หากคุณต้องการสินค้าคงคลังของแผนการเริ่มต้น คุณสามารถตั้งชื่อคุณสมบัติหลักของพวกมันได้ ในวงจรสำหรับการกระตุ้นตัวเอง ทรานซิสเตอร์กำลังมากขึ้นจะถูกผสมเข้าด้วยกัน อันเป็นผลมาจากการที่ไมโครเซอร์กิต Upom ถูกกระตุ้น ในวงจรเราจะเริ่มใช้ Upom และผลที่ได้คือการผสมผสานของทรานซิสเตอร์กำลัง นอกจากนี้ในวงจรสำหรับการกระตุ้นตัวเองด้วย Upom ให้ตั้งค่าความดันใกล้กับ + 26V และสำหรับวงจรที่มีพรีมัสเพื่อกระตุ้น - ใกล้กับ + 12V
วงจรที่มีพรีมัส zbudzhennyam (พร้อมหม้อแปลง) แสดงในรูปที่ 16

รูปที่ 16 โครงการเริ่มต้นจากหน่วยจ่ายไฟของหน่วยพัลส์ PS-200B (LING YIN GROUP)
น้ำตกสภาพอากาศ
ควรใช้น้ำตกที่แคบเพื่อเชื่อมต่อน้ำตกที่บังคับออกด้านนอกจากเลนควบคุมการไหลต่ำ
วงจรที่ใช้งานได้จริงเพื่อกระตุ้นน้ำตก uzgodzhuvalny ใน DBZh ใหม่ สามารถแบ่งออกเป็นสองตัวเลือกหลัก:
ตัวเลือกทรานซิสเตอร์, ปุ่ม de yak vikoristovuyutsya เรียกว่าทรานซิสเตอร์ใน vikonanni แบบไม่ต่อเนื่อง;
รุ่นที่ไม่มีทรานซิสเตอร์, ปุ่ม de jak vikoristoyutsya vikhіdnіทรานซิสเตอร์ของ microcircuit ที่แท้จริงที่สุด VT1, VT2 (ในส่วนประกอบvikonannі)
นอกจากนี้ในความคุ้นเคยอีกอย่างหนึ่งซึ่งเป็นไปได้ที่จะจำแนกน้ำตกซึ่งสามารถใช้ได้ єวิธีการควบคุมทรานซิสเตอร์กำลังบนอินเวอร์เตอร์บริดจ์ เพื่อความคุ้นเคยที่ดีของน้ำตก uzgodzhuvalny ทั้งหมด คุณสามารถใช้:
การลดหลั่นจากการควบคุมภายนอก การดีคอนโทรลของทรานซิสเตอร์กำลังดำเนินการอยู่เบื้องหลังการเพิ่มหม้อแปลงควบคุมภายนอกหนึ่งตัวสำหรับพวกมัน ซึ่งมีขดลวดหลักหนึ่งเส้นและขดลวดทุติยภูมิสองเส้น
น้ำตกที่มี keruvans แยกจากกัน de-keruvannya โดยผิวหนังจากทรานซิสเตอร์กำลังถูกละเมิดจากหม้อแปลงเสริม tobto ในน้ำตก uzgodzhuvalny มีหม้อแปลงควบคุมสองตัว
Vyhodyach จากทั้งสองประเภท น้ำตกแคบไหล สามารถใช้ได้ด้วยวิธีใดวิธีหนึ่งต่อไปนี้:
ตัวควบคุมที่ใช้ทรานซิสเตอร์
ทรานซิสเตอร์สำหรับการควบคุมแบบแยกส่วน
ไร้ทรานซิสเตอร์จากการจัดการภายนอกองค์กร
ไม่มีทรานซิสเตอร์จากการจัดการที่แยกจากกัน
ทรานซิสเตอร์ลดหลั่นด้วย keruvans ที่แยกจากกันแทบจะไม่สามารถหยุดนิ่งได้ หรือพวกมันไม่หยุดนิ่ง ผู้เขียนไม่สามารถมีส่วนร่วมกับรูปแบบน้ำตกดังกล่าวได้ มีสามตัวเลือกที่จะพบบ่อยขึ้น
ที่ลิงค์ทั้งหมดของ vypads จากน้ำตกพลังงาน พวกมันทำงานในลักษณะของหม้อแปลงไฟฟ้า
ในเวลาเดียวกัน หม้อแปลงไฟฟ้ามีหน้าที่หลักสองประการ: การเสริมความแข็งแกร่งของสัญญาณไปยังดีด (เพื่อลดความเค้น) และการเชื่อมต่อทางไฟฟ้า การเชื่อมต่อแบบกัลวานิกมีความจำเป็นเนื่องจากไมโครเซอร์กิตและน้ำตก ซึ่งเป็นอุซก็อจจู ตั้งอยู่ด้านที่สอง และน้ำตกพลังงานอยู่ด้านแรกของ DBZh
หุ่นยนต์สามารถเข้าใจตัวเลือกที่เหมาะกับผิวสำหรับน้ำตก uzgodzhuvalny บนก้นเฉพาะ
วงจรทรานซิสเตอร์จากตัวควบคุมภายนอก เช่น น้ำตก uzgodzhuvalny มีหม้อแปลงสองวงจรที่ด้านหน้าของแหล่งจ่ายไฟด้านหน้าของทรานซิสเตอร์ Q3 และ Q4 (รูปที่ 17)

Malunok 17. Uzgodzhuyuchiy น้ำตกของหน่วยที่อยู่อาศัยแรงกระตุ้น KYP-150W (วงจรทรานซิสเตอร์จาก keruvans ภายนอก)

รูปที่ 18. รูปแบบที่แท้จริงของแรงกระตุ้นต่อนักสะสม
สตรีมผ่านไดโอด D7 และ D9 เพื่อให้ไหลผ่านพลังงานแม่เหล็กที่ฉีดเข้าไปในแกน DT คุณอาจเห็นเลขชี้กำลังลดลง แกน DT มีเวลาหนึ่งชั่วโมงในการส่งผ่านสตริงผ่านไดโอด D7 และ D9 สำหรับการไหลของแม่เหล็กต่ำ (สลายตัว) เพื่อให้พัลส์ EPC ปรากฏบนขดลวดที่สอง
ไดโอด D8 ดูดซับน้ำตก uzgodzhuvalny ลงในไมโครเซอร์กิตซึ่งควบคุมผ่านบัส zalny
ทรานซิสเตอร์ชนิดที่สอง uzgodzhuvalny เรียงซ้อนจากตัวควบคุมภายนอกที่จะติดตั้งในหน่วยพัลส์ ESAN ESP-1003R (รูปที่ 19) ความพิเศษประการแรกของตัวเลือกนี้คือทรานซิสเตอร์ที่ทรานซิสเตอร์ VT1, VT2 ถูกเปิดเมื่อมีการปล่อยซ้ำ สัญญาณVyhіdniเป็นที่รู้จักจาก 9 visnovkіv, 10 microcircuits ตัวต้านทาน R17, R16 і R15, R14 єพร้อมทรานซิสเตอร์แบบมีสายภายใน VT1 และ VT2 ดังที่แสดง ตัวต้านทานแบบดิจิตอลใช้เป็นพื้นฐานสำหรับทรานซิสเตอร์ Q3, Q4 เนื่องจากทำงานในโหมดสวิตช์ ความจุ C13 และ C12 กำลังบังคับและเร่งกระบวนการเปลี่ยนทรานซิสเตอร์ Q3, Q4 คุณลักษณะเฉพาะอีกอย่างของน้ำตกคือขดลวดหลักของหม้อแปลง DT ซึ่งถูกควบคุมไม่ได้เชื่อมต่อจากจุดตรงกลางและเชื่อมต่อระหว่างตัวสะสมของทรานซิสเตอร์ Q3, Q4 หากทรานซิสเตอร์เอาท์พุต VT1 ของไมโครเซอร์กิตเปิดอยู่ แสดงว่าขึ้นอยู่กับฐาน Upom สำหรับทรานซิสเตอร์ Q3 R17, R16 โดยผ่านช่วงการเปลี่ยนภาพที่รุนแรง Q3 มันขัดกับสตริงและปรากฏขึ้น ฉันจะเร่งกระบวนการบังคับหน่วย C13 ซึ่งจะป้องกันไม่ให้อุปทานของ struma ไปยังฐาน Q3 ซึ่งจะเปลี่ยนค่าที่ตั้งไว้ 2-2.5 เท่า ผลของการเปิดไตรมาสที่ 3 คือขดลวดปฐมภูมิของ 1-2 DT เชื่อมต่อกับเคสด้วยปลั๊ก 1 เนื่องจากทรานซิสเตอร์ Q4 อีกตัวปิดลง จากนั้นผ่านขดลวดปฐมภูมิ DT จะซ่อมแซมดีดสะสมด้วยทวนผ่านขดลวดปฐมภูมิ: Upom - R11 - 2-1 DT - to-e Q3 - เคส

Malunok 19. น้ำตกของพัลส์ลิฟวิ่งยูนิต ESP-1003R ESAN ELECTRONIC CO., LTD (วงจรทรานซิสเตอร์สำหรับควบคุมภายนอก)
บนขดลวดทุติยภูมิ 3-4 และ 5-6 DT มีแรงกระตุ้น EPC ของรูปสี่เหลี่ยมผืนผ้า เกลียวของขดลวดทุติยภูมิ DT rіzniy นอกจากนี้ ทรานซิสเตอร์กำลัง (ไม่แสดงในแผนภาพ) ตัวใดตัวหนึ่งจะยกเลิกพัลส์พื้นฐานซึ่งเป็นส่วนโค้งและอันสุดท้ายเป็นแบบโค้ง หาก VT1 เป็นไมโครเซอร์กิตแบบโค้ง มันจะปิดอย่างรวดเร็ว ข้างๆ กันก็จะปิดอย่างรวดเร็วเช่นกัน และ Q3 ฉันจะเร่งกระบวนการโค้งด้วยแรงของช่อง C13 แต่จำเป็นต้องใช้ขั้วกับการเปลี่ยนแปลง Q3 ของตัวส่งสัญญาณฐาน มี "เขตตาย" หากปิดความผิดของทรานซิสเตอร์อิเล็กทรอนิกส์ของไมโครเซอร์กิต จากนั้นทรานซิสเตอร์เอาท์พุท VT2 จะปรากฏขึ้นและเราจะจัดหาแหล่งจ่ายไฟด้วยฐาน Upom สำหรับทรานซิสเตอร์อื่น Q4 สำหรับ R15, R14 เพื่อ Q4 นั้นปรากฏขึ้นและขดลวดหลัก 1-2 DT ดูเหมือนจะเชื่อมต่อกับร่างกายด้วยปลายของมันเอง (visnovka 2) ซึ่งผ่านมัน กระแสที่สร้างขึ้นของด้านหน้าไปข้างหน้าเลื่อนลงไปที่หอก- e-R10-: Dom -R10-: Dom -R10-: Dom -R "เฟรม"
ดังนั้นขั้วของพัลส์บนขดลวด DT ทุติยภูมิจึงเปลี่ยนไป และเมื่อปิดพัลส์ ทรานซิสเตอร์กำลังอื่นจะถูกยกเลิก แต่ในฐานของโหมดแรก ขั้วแบบโค้งพัลส์ หาก VT2 เป็นไมโครเซอร์กิตโค้ง Q4 ก็จะม้วนตัวอยู่ข้างๆ อย่างรวดเร็วด้วย (หลังการเพิ่มหน่วยพลังงานบังคับ C12) ทุกวันนี้มี "เขตมรณะ" ซึ่งกระบวนการซ้ำแล้วซ้ำอีก
ในระดับดังกล่าว แนวคิดหลักถูกวางในน้ำตกของหุ่นยนต์ ขั้วคือการเปลี่ยนแปลงของกระแสแม่เหล็กที่แกน DT ถูกนำไปใช้กับความจริงที่ว่าขดลวด DT หลักเชื่อมต่อกับเคสด้วยอันเดียว แล้วด้วยของมันเอง ตัวเชื่อมต่อ ในการทำเช่นนั้น จะมีการเปลี่ยนแปลงใน strum ที่ไม่มีที่เก็บข้อมูลหลังการจัดเก็บที่มี unipolar vivification
ในรุ่นปลอดทรานซิสเตอร์ของ uzgodzhuvalny น้ำตกของทรานซิสเตอร์ DBZh จามรีในน้ำตก uzgodzhuvalny ตามที่ตั้งใจไว้ก่อนหน้านี้ ทรานซิสเตอร์ vikoristovuyutsya VT1, VT2 ของไมโครเซอร์กิต โดยทั่วไปจะมีทรานซิสเตอร์แบบไม่ต่อเนื่องสำหรับน้ำตก uzgodzhuvalny ในหนึ่งวัน
วงจรแบบไม่มีทรานซิสเตอร์จากตัวควบคุมในพื้นที่ได้รับชัยชนะ เช่น จากวงจร DBZh PS-200V ทรานซิสเตอร์เอาท์พุทของ microcircuit VT1, VT2 ถูกติดตั้งโดยตัวสะสมของขดลวดหลักของหม้อแปลง DT (รูปที่ 20) ความมีชีวิตชีวาลดลงจนถึงจุดกึ่งกลางของ DT ของขดลวดปฐมภูมิ
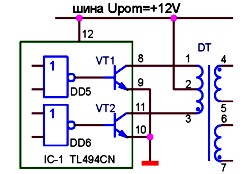
รูปที่ 20. Uzgodzhuvalny น้ำตกของหน่วยชีพจรที่อยู่อาศัย PS-200B (วงจรปลอดทรานซิสเตอร์จาก keruvans ภายนอก)
หากทรานซิสเตอร์ VT1 เปิดอยู่ ดีดหรือสะสมจะไหลผ่านทรานซิสเตอร์ทั้งหมดไปยังขดลวด 1-2 ของหม้อแปลง DT บนขดลวดทุติยภูมิ DT มีพัลส์ที่เป็นของแข็ง แต่ขั้วอาจเหมือนกัน แต่ทรานซิสเตอร์กำลังของอินเวอร์เตอร์ตัวใดตัวหนึ่งจะเปิดขึ้นและอีกตัวหนึ่งจะเปิดขึ้น เมื่อแรงกระตุ้น VT1 สิ้นสุดลงอย่างรวดเร็ว การดีดผ่านขดลวด 1-2 DT จะหยุดต้าน ดังนั้น EPC บนขดลวดทุติยภูมิ DT จะทำงานจนกว่าทรานซิสเตอร์กำลังจะโค้ง มี "เขตตาย" หากความผิดของทรานซิสเตอร์ VT1, VT2 ของ microcircuit ถูกปิดและการดีดผ่าน DT ที่คดเคี้ยวหลักไม่ขัดแย้ง ทรานซิสเตอร์ VT2 และดีดขยาย เพิ่มขึ้นในชั่วโมง ผ่านทรานซิสเตอร์ทั้งหมดและที่ขดลวด 2-3 DT กระแสแม่เหล็กกระพือด้วย cyme กับดีดที่แกน DT ไม่ได้อยู่ตรงหน้าโดยตรง สำหรับขดลวดทุติยภูมิ DT EPC จะเหนี่ยวนำให้ขั้วตรงข้ามตกด้านหน้า เป็นผลให้ทรานซิสเตอร์อีกตัวบนอินเวอร์เตอร์บริดจ์ปรากฏขึ้นและบนพื้นฐานของพัลส์แรกขั้วจะโค้ง หาก VT2 ของไมโครเซอร์กิตโค้ง ให้ดีดผ่านขดลวด DT ใหม่และหลักให้แน่น นั่นคือพวกเขารู้ว่า EPC บนขดลวดทุติยภูมิ DT และทรานซิสเตอร์กำลังของอินเวอร์เตอร์ถูกปิดอีกครั้ง ทุกวันนี้มี "เขตมรณะ" ซึ่งกระบวนการซ้ำแล้วซ้ำอีก
แนวคิดหลักของการกระตุ้นน้ำตกของเสาคือความจริงที่ว่ากระแสแม่เหล็กที่เปลี่ยนแปลงที่แกนหม้อแปลงซึ่งถูกควบคุมนั้นถูกจ่ายให้เพื่อแก้ไขแรงดันไฟที่จ่ายไปยังจุดกึ่งกลางของขดลวดปฐมภูมิของหม้อแปลงไฟฟ้า ในการนั้น สตรูมีจะถูกส่งผ่านขดลวดด้วยจำนวนรอบเท่ากันที่เกลียวต่างกัน หากปิดทรานซิสเตอร์ของไมโครเซอร์กิต ("เดดโซน") การไหลของแม่เหล็กที่แกน DT จะเป็น 0 กระแสแม่เหล็กที่เกิดขึ้นที่แกนจะแปรผัน
ส่วนที่เหลือของรูปแบบที่มีความหมาย (วงจรไร้ทรานซิสเตอร์ที่มีการควบคุมแยกต่างหาก) สามารถพบได้ใน DBZ ของคอมพิวเตอร์ Appis (เปรู) วงจรนี้มีหม้อแปลงควบคุมสองตัว DT1, DT2, ขดลวดปฐมภูมิจะติดตั้งตัวสะสมสำหรับทรานซิสเตอร์เอาท์พุทของไมโครเซอร์กิต (รูปที่ 21) ที่วงจร ts_y ของการดูแลผิวจากปุ่มเปิดปิดสองปุ่มที่จะเชื่อมต่อผ่านหม้อแปลงขอบ ถ่ายทอดสดถูกส่งไปยังคอลเลกชันของทรานซิสเตอร์เอาท์พุตของไมโครเซอร์กิตจากบัสแบ็คเพลน Upom ผ่านจุดกึ่งกลางของขดลวดปฐมภูมิของหม้อแปลงควบคุม DT1, DT2
ไดโอด D9, D10 ที่มีส่วนต่อของขดลวดปฐมภูมิ DT1, DT2 อนุมัติวงจรสำหรับสนามแม่เหล็กของแกน เราจะเข้าร่วมการบรรยายทั้งมื้อ

Malunok 21. Uzgodzhuvalny น้ำตกของหน่วยพัลส์ "Appis" (วงจรไม่มีทรานซิสเตอร์ของการควบคุมการกระจาย)
น้ำตก Uzgodzhuyuchiy (รูปที่ 21) ตามจริงแล้วการย้อนกลับไปข้างหน้าแบบจังหวะเดียวอิสระสองครั้งเพราะ vidkriva ดีดตรงข้ามกับฐานของทรานซิสเตอร์กำลังก่อนชั่วโมงของทรานซิสเตอร์ uzgodzhuvalnogo, tobto uzgozhuyuchiy และผูกมันผ่านทรานซิสเตอร์กำลังของหม้อแปลงvіdkrytіหนึ่งชั่วโมง ด้วยความผิดจำนวนมาก หม้อแปลงแรงกระตุ้น DT1, DT2 จะถูกทำความสะอาดจากกระแสหลังการจัดเก็บของขดลวดปฐมภูมิ tobto จากความสนิทสนมไปจนถึงเด็ก หากคุณไม่โอนสายพิเศษจากแกนแม่เหล็ก กลิ่นเหม็นจะหายไปจากแม่เหล็กเป็นเวลาสองสามช่วงของหุ่นยนต์ ซึ่งจะนำไปสู่การเปลี่ยนแปลงที่สำคัญในการเหนี่ยวนำของกระแสชั่วคราวของขดลวดปฐมภูมิและ 2 กระบวนการนี้เข้าใจง่าย เช่น การแปลงบนทรานซิสเตอร์ VT1 และหม้อแปลง DT1 หากทรานซิสเตอร์ VT1 เปิดผ่านขดลวดหลัก 1-2 DT1 กับดีดจะมีการสร้างเส้นตรงตามแนวเลน: Upom -2-1 DT1 - to-e VT1 - "case"
หากแรงกระตุ้นในการปลดล็อกจากระดับ VT1 สิ้นสุดลง แรงกระตุ้นจะปิดลงอย่างรวดเร็ว ดึงดีดผ่านขดลวด 1-2 DT1 อย่างไรก็ตาม EPC บนขดลวดซึ่งทำการแม่เหล็กซ้ำ 2-3 DT1 โดยมีการเปลี่ยนแปลงขั้วอย่างกว้างขวางและผ่านการม้วนและไดโอด D10 ผ่านแกน DT1 ที่เป็นแม่เหล็กอีกครั้งตามแลนซ์: 2 DT1 - Upom - C9- " DT1" - D10-3
Strum tei - ล้มลงเป็นเส้นตรง, tobto ฟลักซ์แม่เหล็กผ่านแกน DT1 เปลี่ยนสัญญาณ และแกนเริ่มที่จะเป็นแม่เหล็ก ในระดับนี้การหมุนเวียนของพลังงานส่วนเกินที่เก็บไว้ในเซิร์ฟเวอร์ DT1 เป็นเวลาหนึ่งชั่วโมงของทรานซิสเตอร์ VT1 ที่เปิดในหนึ่งชั่วโมงจะถูกเพิ่มในวงจรนาฬิกา (ตัวเก็บประจุ C9 ของบัส Upom ถูกชาร์จ)
อย่างไรก็ตามความแตกต่างของการดำเนินการของน้ำตก uzgodzhuvalny ของ naymensh privablivy, tk ความผิดของหม้อแปลง DT1, DT2 ทำงานภายใต้ขดลวดตามการเหนี่ยวนำและกับตอหลังการเก็บรักษาของขดลวดปฐมภูมิ การดึงดูดแกน DT1 อีกครั้ง, DT2 เป็นไปตามวัฏจักรส่วนตัว โดยมองหาเฉพาะดัชนีเชิงบวกเท่านั้น กระแสแม่เหล็กในแกนผ่านโซ่นั้นเต้นเป็นจังหวะ แก้แค้นหลังโกดัง จำเป็นต้องสร้างตัวบ่งชี้น้ำหนักและขนาดของหม้อแปลง DT1, DT2 ที่จินตนาการได้ นอกจากนี้ ในบางกรณีของน้ำตก uzgodzhuvalny จำเป็นต้องใช้หม้อแปลงสองตัวแทนที่จะเป็นตัวเดียว
คำอธิบาย
- ฟังก์ชันชุดใหม่ SHIM-keruvannya
- Vykhidny ดีด, scho vitikєหรือvitikє, เอาต์พุตทางผิวหนัง 200mA
- หุ่นยนต์สามารถมีโหมดสองจังหวะหรือหนึ่งจังหวะได้หรือไม่?
- มีการชักนำแผนการยับยั้งแรงกระตุ้นทางสุขภาพ
- การควบคุมที่หลากหลาย
- Vyhіdnaรองรับสปริง 5V + -05%
- การซิงโครไนซ์ถูกจัดระเบียบอย่างเรียบง่าย
Vіtchiznyanyอะนาล็อก: 1114ЕУ3 / 4.
โดยเฉพาะอย่างยิ่ง ประตูเพื่อกระตุ้นการทำให้มีชีวิตทุติยภูมิ (IVP) ของไมโครเซอร์กิต TL493 / 4/5 จะช่วยให้โบรกเกอร์มีความยืดหยุ่นมากขึ้นในการออกแบบแผนการควบคุม IVP แนบ TL493 / 4/5 เพื่อรวม pidsiluvach pompilka, เครื่องกำเนิดเรกูเลเตอร์ vvudovanie, ตัวเปรียบเทียบสำหรับควบคุมชั่วโมงที่ตาย, ทริกเกอร์ควบคุม, ION ที่แม่นยำสำหรับ 5V และวงจรควบคุมของเอาต์พุตเรียงซ้อน พิดศิลูวาคของแบบฟอร์มอยู่ในเฟสในช่วงตั้งแต่ –0.3 ... (Vcc-2) ตัวเปรียบเทียบสำหรับการควบคุมเวลาตายจะเปลี่ยนแปลงอย่างถาวร เนื่องจากจะล้อมรอบความไม่สำคัญขั้นต่ำของชั่วโมงที่เสียชีวิตด้วยค่าประมาณ 5%
อนุญาตให้ซิงโครไนซ์เครื่องกำเนิดไฟฟ้าในตัวพร้อมการเชื่อมต่อเพิ่มเติมกับไดรเวอร์ Rก่อนการเข้ามาของกองกำลังสนับสนุนและการส่งแรงตึงเหมือนไฟล์อินพุตบนสดใส Z scho vikoristovutsya กับหุ่นยนต์ซิงโครนัสของวงจรบอลสกรูหลายตัว Nezalezhnіvyhіdnіformovachіบนทรานซิสเตอร์จะให้ความสามารถของหุ่นยนต์ในการส่งออกน้ำตกหลังวงจรจากเครื่องส่งสัญญาณภายนอกหรือหลังวงจรของทวนสัญญาณภายนอก เอาต์พุตคาสเคดของไมโครเซอร์กิต TL493 / 4/5 ทำงานในโหมดรอบเดียวหรือสองจังหวะพร้อมโหมดเลือกสำหรับอินพุตพิเศษเพิ่มเติม มีการแนะนำรูปแบบการควบคุมการตอบสนองของผิวหนังและการรับชีพจรที่มีสุขภาพดีในโหมดสองจังหวะ มาเลย มาเลย sufiks หลี่, รับประกันหุ่นยนต์ปกติในช่วงอุณหภูมิ -5 ... 85C โดยมีส่วนต่อท้าย C รับประกันหุ่นยนต์ปกติในช่วงอุณหภูมิ 0 ... 70C
บล็อกไดอะแกรมของ TL494
การแพร่กระจายของ visnovkiv

ค่าขอบเขตของพารามิเตอร์
นาปูก้า ลิเวนย่า 41 วี
แหล่งจ่ายไฟเข้า (Vcc + 0.3)
นักสะสม Vyhіdna napruga 41V
Vyhіdnyเก็บดีด 250mA
แรงกดดันที่สำคัญของการเติบโตในโหมดต่อเนื่อง 1W
ช่วงอุณหภูมิในการทำงานช่วงกลาง:
Z sufiks L -25..85C
З sufiks С..0..70С
ช่วงอุณหภูมิ zberigannya -65 ... + 150C
คำอธิบายของหุ่นยนต์
ไมโครเซอร์กิต TL494 เป็นตัวควบคุม PWM ของอิมพัลส์ dzherel สด ซึ่งทำงานบนความถี่คงที่ และรวมบล็อกที่จำเป็นทั้งหมด เครื่องกำเนิดความตึงเหมือนเลื่อยถูกสร้างขึ้นโดยการตั้งค่าความถี่หรือน้อยกว่าสองส่วนประกอบเฉพาะ R และ З ความถี่ของเครื่องกำเนิดจะขึ้นอยู่กับสูตร: F osc = 1.1 / R * C
การปรับความกว้างของพัลส์เอาต์พุตถึงสัดส่วนของความเค้นเหมือนไฟล์ที่เป็นบวกบนตัวเก็บประจุ Zด้วยสองสัญญาณหลัก (ไดอะแกรม div. tim-chasovu) องค์ประกอบลอจิก ABO-NOT zbudzhu vyhіdnіทรานซิสเตอร์ Q1і Q2เฉพาะ todi ถ้าเส้นของเส้นชั้นเชิงในทริกเกอร์ที่ถูกทริกเกอร์อยู่ใน ต่ำสถานีตรรกะ เป็นไปได้ที่จะเห็นมันหลังจากชั่วโมงนั้นเท่านั้น ถ้าแอมพลิจูดของความเครียด pilkopodibnoy เป็นแอมพลิจูดของสัญญาณ ดังนั้นจึงถูกควบคุม การปรับแอมพลิจูดของสัญญาณแบบเดียวกัน, วิธีการควบคุม, การเปลี่ยนแปลงแบบวนรอบของความกว้างของพัลส์เอาต์พุต บนพื้นฐานของสัญญาณเสียงแหลม มีสปริงสั่นโดยรูปแบบการควบคุมเวลาตาย (รูปแบบ 4), podsilyuvachi pomilki (รูปแบบ 1, 2, 15, 16) และทวนของเสียงกริ่ง (รูปแบบ 3)
อินพุตของตัวเปรียบเทียบสำหรับการควบคุมเวลาตายคือ 120mV ซึ่งเชื่อมโยงชั่วโมงการตายขั้นต่ำที่อินพุตด้วยความไม่สำคัญ 4% แรกกับวงจรของความเค้นเหมือนเลื่อย ด้วยเหตุนี้ ความไม่สำคัญสูงสุดของวงจรการทำงานจึงกลายเป็น 96% ในกรณีของการดรอป เมื่อการลงกราวด์เป็น 13 และ 48% อยู่ในการดรอป เมื่อมีการรองรับกับ 13
ค่าเล็กน้อยของเวลาตายที่ทางออกสามารถทำได้โดยนำไปใช้กับอินพุตการปรับชั่วโมงตาย (แสดง 4) อย่างต่อเนื่องในช่วง 0..3.3V ตัวเปรียบเทียบ PWM จะปรับความกว้างของพัลส์เอาต์พุตจากค่าสูงสุด ซึ่งเริ่มต้นด้วยศักยภาพที่อินพุตเพื่อปรับชั่วโมงตายเป็นศูนย์ หากแรงเรียกเปลี่ยนจาก 0.5 เป็น 3.5 V ความผิด pidsilyuvachi pomilki อาจเป็นช่วงอินพุตของสัญญาณในเฟสตั้งแต่ -0.3 ถึง (Vcc-2.0) และสามารถอ่านค่าของความเครียดหรือดีดจากเอาต์พุตของที่อยู่อาศัยได้ ใส่ pidsilyuvachiv pomilki Mayut active วิโซกสปริง rіvenและฟังก์ชั่นรวม ABOบนอินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ PIM ในการกำหนดค่าดังกล่าว ลูปควบคุมจะอยู่ในช่วงเวลาต่ำสุดของการเปิดอินพุต ซึ่งอยู่ในลูปควบคุม การปล่อยประจุต่อชั่วโมงของตัวเก็บประจุ Zแรงกระตุ้นเชิงบวกจะถูกสร้างขึ้นที่เอาต์พุตของตัวเปรียบเทียบเพื่อควบคุมเวลาตาย Q1і Q2... ที่อินพุตของโหมดการสั่นสะเทือน โหมดหุ่นยนต์จะมาพร้อมกับแรงดันอ้างอิง (visnovok 13) ทริกเกอร์ที่ไม่มีการควบคุมล่วงหน้าของทรานซิสเตอร์เอาต์พุตสองตัวในแอนติเฟส (โหมดสองจังหวะ) และความถี่เอาต์พุตที่ไดรฟ์เต็มรูปแบบของ ครึ่งหนึ่งของความถี่เครื่องกำเนิดไฟฟ้า รูปแบบเอาต์พุตยังสามารถทำงานในโหมดรอบเดียวได้หากความผิดของทรานซิสเตอร์เปิดและปิดหนึ่งชั่วโมงหากรอบการทำงานสูงสุดที่ต้องการไม่เปลี่ยนแปลง 50% แนะนำให้ใช้โหมดทั้งหมดเพื่อให้ได้ชัยชนะหากหม้อแปลงเชื่อมต่อกับขดลวดด้วยไดโอดแบบพึ่งพาซึ่งกันและกันซึ่งเป็นชัยชนะในการยับยั้งกระบวนการชั่วคราว แม้ในโหมดปลายเดียว ก็ยังต้องการดีดขนาดใหญ่ ทรานซิสเตอร์เอาท์พุตสามารถทำได้ในแบบคู่ขนาน โดยรวมแล้วจำเป็นต้องปิดอินพุตลงกับพื้นในโหมดหุ่นยนต์ OTS และเพื่อป้องกันสัญญาณเอาต์พุตจากทริกเกอร์ ความถี่อยู่นอกช่วงความถี่ของเครื่องกำเนิด
ไมโครเซอร์กิต TL494 สามารถใช้สร้างสปริงรองรับ 5V ได้ จึงปกป้องดีดได้สูงถึง 10mA สำหรับการเปลี่ยนส่วนประกอบวงจร สปริงรองรับช่วยให้มีความทนทาน 5% ของช่วงอุณหภูมิการทำงานตั้งแต่ 0 ถึง 70C
ไมโครเซอร์กิต TL494 ใช้ฟังก์ชันการทำงานของคอนโทรลเลอร์ PIM และมักใช้เพื่อกระตุ้นยูนิตที่มีชีวิตแบบพัลซิ่งสองจังหวะ (ไมโครเซอร์กิตเองมักใช้ในยูนิตที่ใช้กับคอมพิวเตอร์)
หน่วยที่อยู่อาศัยของแรงกระตุ้นจะปรากฏอย่างชัดเจนเป็น KKD ที่ติดตั้งกับหม้อแปลง ซึ่งมีการเปลี่ยนแปลงตามขนาด พารามิเตอร์เอาต์พุตที่เสถียร อย่างไรก็ตาม ด้วยการเปลี่ยน HF ของ dzherelami จำนวนมากและแสดง vimogs พิเศษจนถึงแรงดันไฟฟ้าขั้นต่ำ (หากไม่มี หน่วยจ่ายไฟอาจไม่เริ่มทำงาน)
บล็อกไดอะแกรมของวิกลีด TL494 มีดังนี้
เล็ก. 1. บล็อกไดอะแกรมของ TL494
การแต่งตั้ง visnovk_v TL494 ที่ pri'yazts_ ให้กับร่างของ ma viglyad

เล็ก. 2. การแต่งตั้ง visnovk_v TL494

เล็ก. 3. Zovn_shn_y viglyad ใกล้อาคาร DIP
คุณสามารถเป็นผู้เยี่ยมชม
จามรีอนาลอกที่ทันสมัยสามารถเห็นได้:
1. รุ่นย่อของชิปอินพุต - TL594 และ TL598 (ความแม่นยำและการทำซ้ำของอินพุตได้รับการปรับให้เหมาะสม);
2. แอนะล็อกโดยตรงของ virobnitstva รัสเซีย - К1006ЕУ4, KR1114ЕУ4
อย่างที่คุณเห็นจาก vyshevikladenogo microcircuit ของ dosi ไม่เก่าและสามารถ vikoristovuvatisya อย่างแข็งขันในชีวิตประจำวันเช่นองค์ประกอบ vuzlovy
หนึ่งในตัวเลือกในหน่วยที่อยู่อาศัยแบบพัลส์สำหรับ TL494
วงจรจ่ายไฟต่ำกว่า

เล็ก. 4. วงจรจ่ายไฟ
ที่นี่สำหรับการจำลองเสมือนของดีดจะใช้ทรานซิสเตอร์สองตัว (ต้องต่อเข้ากับแหล่งจ่ายความร้อน) กลิ่นเหม็นของความผิดกำลังมีชีวิตอยู่จาก okremogo dzherel post_yayny struma ตัวอย่างเช่นการแปลง DC-DC แบบแยกส่วนเช่น TEN 12-2413 หรืออนาล็อก
จากขดลวดขาออกของหม้อแปลงไฟฟ้า (สามารถเปิดโซ่ได้) ใกล้เคียงกับ 34 เซนต์

เล็ก. 5. BP . เวอร์ชันอื่น
วงจรกำลังรับรู้หน่วยจ่ายไฟที่มีแรงกระจัดที่มีการควบคุม (สูงถึง 30V) และธรณีประตูหลังแรงของสตรูมา (สูงถึง 5A)
จามรีเชื่อมต่อโครงข่ายไฟฟ้าในรูปแบบของหม้อแปลงไฟฟ้าแบบสเต็ปดาวน์ ที่เอาต์พุตของขดลวดทุติยภูมิ (หรือชุดของขดลวดทุติยภูมิเดี่ยว) แหล่งจ่ายไฟใกล้กับ 40V
L1 - เค้น Toroidal VD1 - ไดโอด Schottky ยืนบนวิทยุ ตรวจสอบข้อผิดพลาดในวงจรการแก้ไข
การเดิมพันตัวต้านทาน R9 และ 10 รวมถึง R3 และ 4 สามารถใช้สำหรับการปรับ "ที่แม่นยำโดยประมาณ" เพื่อบังคับให้ดีด
บนหม้อน้ำ krim diode VD1 slіd vinesti:
1.Dіodny mіst (เช่น KBPC 3510);
2.ทรานซิสเตอร์ (สำหรับวงจร vikoristovuvsya KT827A แอนะล็อกได้);
3. Shunt (บนไดอะแกรมการกำหนด R12);
4. หมากฝรั่ง (คอยล์ L1).
ทางที่ดีควรเป่าแหล่งจ่ายความร้อนรอบๆ เตาด้านหลังพัดลมเพิ่มเติม (เช่น พัดลมระบายความร้อน 12 ซม. จากพีซี)
อินดิเคเตอร์หรืออินดิเคเตอร์อาจเป็นแบบดิจิทัล (วิธีที่ง่ายที่สุดในการเตรียมการ) หรือแอนะล็อก (คุณต้องสอบเทียบมาตราส่วน)
ตัวเลือกที่สาม

เล็ก. 6. BP . รุ่นที่สาม
ตัวเลือกของ Kintsevo Realization


เล็ก. ๗. ข้าพเจ้าจะผนวกนามของวิญญะ
น่าตื่นเต้นสำหรับผู้ที่มี TL494 มีแรงกดดันเล็กน้อยในองค์ประกอบหลักในตัวเพื่อช่วยควบคุมหม้อแปลงหลัก TR2 ทรานซิสเตอร์ T3 і 4 จะถูกสำรอง กลิ่นเหม็นในเซลล์ของคุณจะถูกควบคุมโดยหม้อแปลงไฟฟ้า TR1 (และ 2 ในหม้อแปลง T1) เพื่อเรียกใช้การควบคุมย่อยแบบเรียงซ้อนของตัวเอง
คันเร่ง L5 ฉันจะมอบ zhovtoy k_ltsі (50 รอบ) ปาเป้ากลาง 1.5 มม.)
องค์ประกอบความร้อนส่วนใหญ่เป็นทรานซิสเตอร์ T3 และ 4 รวมถึงไดโอด D15 กลิ่นเหม็นมีความผิดในการเป็น montuvatisya สำหรับการจ่ายความร้อน (bazhano พร้อมกระแสลม)
เค้น L2 vikoristovuyutsya ที่วงจรเพื่อดับ HF-overshkod ที่ด้านล่างของรั้ว
Zvazhayuchi กับสิ่งเหล่านั้น แต่ TL494 ไม่สามารถ pratsyuvati บนสปริงสูงสำหรับการใช้ชีวิตїїใช้หม้อแปลงภายนอก (Tr3 - tse BV EI 382 1189 บนเอาต์พุต yakogo 9, 500 mA)
สำหรับองค์ประกอบจำนวนดังกล่าว วงจรในรั้วสามารถใส่ลงในเคส Z4A ได้อย่างง่ายดาย อย่างไรก็ตาม ยังคงจำเป็นต้องเพิ่มขั้นตอนเพิ่มเติมบางอย่างเพื่อรักษากระแสลม (วางพัดลมไว้ด้านบน)
รายการยอดนิยมองค์ประกอบจะชี้ด้านล่าง
หน่วยจ่ายไฟจะเปิดขึ้นจนกว่าจะมีการทำดีดแบบเปลี่ยนได้ และจะไม่สามารถอยู่ได้ด้วยแรงดันคงที่ในช่วง 0-30V และด้วยแรง 15A สตรูมารูปทรงที่สปริงถูกปรับด้วยตนเอง




วันที่ตีพิมพ์: 22.01.2018
ดุมกี้ ชิตาชีฟ
- โอเล็กซานเดอร์ / 04.04.2019 - 08:25
ไม่สามารถเพิ่มไฟล์ให้เพื่อน? สามารถส่งได้ [ป้องกันอีเมล]
ไมโครเซอร์กิตถูกเก็บไว้ในตัวควบคุม PWM และสายของตัวเปรียบเทียบ ซึ่งอยู่ในสถานะใช้งานและมีส่วนร่วมในสูตรสัญญาณของ P.G. และน้ำตกซึ่งเป็นอุซก็อจู้ถูกเก็บไว้จากสวิตช์หม้อแปลงและทรานซิสเตอร์ จามรี PWM - ตัวควบคุม vikoristovutsya - microcircuit ТL494 (ТL493, ТL495) จาก TEXAS INSTRUMENTS หรืออะนาล็อก - microcircuit МРС494 จาก NEC ชื่อของตาและการผสมพันธุ์ของปลาแสดงในรูปที่ 1 บล็อกไดอะแกรมของ TL494 แสดงในรูปที่ 2
เล็ก. หนึ่ง

เล็ก. 2
ІМСจะเปิดตัวในช่วงเวลาเดียวกันที่ 12 nіzhkuส่งส่วยให้อยู่ในขอบเขตจาก +7 ถึง 40VVisnovki 1 และ 2 - เห็นได้ชัดว่าอินพุตตรงและกลับด้านเมื่อรับสัญญาณจากสัญญาณเรียกเข้า visnovok 4 - อินพุตเพื่อควบคุม "โซนตาย" і 6 (Rт) ใช้สำหรับเชื่อมต่อองค์ประกอบภายนอกของเครื่องกำเนิดภายในของ แรงดันเหมือนเลื่อย, ปลั๊ก 7 - ภายนอก, สิ่งที่แนบมา 8 และ 9 - ตัวสะสมและเซ็นเซอร์ของทรานซิสเตอร์ตัวแรก, สิ่งที่แนบมา 11 และ 10 - ตัวสะสมของทรานซิสเตอร์ของโหมดการสั่นสะเทือนอีก 1 ของหุ่นยนต์ (โหมดหนึ่งหรือสองจังหวะของหุ่นยนต์ ). โดยรวมแล้วการมีอยู่นั้นเป็นบวกสำหรับ 2.4 ... 5 (ตรรกะ "1" สำหรับ TTL - วงจร) - โหมดสองจังหวะของหุ่นยนต์ทำงาน, ทรานซิสเตอร์ Q1 และ Q2 จะปรากฏขึ้นทันที, พัลส์เอาต์พุต ผ่านหนึ่งเฟสผ่านหนึ่งเฟส ตั้งค่าได้ง่าย 0 ... 0.4 Y (ตรรกะ "0" สำหรับ TTL - วงจร) - โหมดรอบเดียว ทรานซิสเตอร์ของคุณสามารถเปิดแบบขนานเพื่อเพิ่มดีดเอาต์พุต Visnovok 14 - ออกจากกระดูกสันหลังส่วนรองรับ (+5) จาก dzherel ที่มีความเสถียรในตัวของกระดูกสันหลังส่วนรองรับ visnovka 16 และ 15 - เห็นได้ชัดว่าตรงและกลับด้านเข้าสู่หลุมฝังศพ podpushyuvach ด้วยสัญญาณของการทับซ้อนกันของตอไม้ PWM - ตัวควบคุมสำหรับความถี่คงที่และเพื่อติดตั้งเครื่องกำเนิดแรงดันไฟฟ้าแบบนักบินซึ่งใช้สำหรับตั้งค่าความถี่ของส่วนประกอบหลักเพียงสองส่วนประกอบเท่านั้น - ตัวต้านทาน RT และตัวเก็บประจุแบบอาร์ต ความถี่ของการสร้างขึ้นอยู่กับสูตรต่อไปนี้:
เสื้อ = 1.1 / RtCt
ด้านหลังมหาวิทยาลัยที่ใช้งานได้จริง คุณสามารถเข้าไปในโกดัง microcircuit ได้ โดยสามารถแบ่งออกเป็นส่วนอนาล็อกและส่วนดิจิทัลได้
ก่อนส่วนอะนาล็อกของ DA 3, DA1.
- เครื่องเปรียบเทียบ DA 1, DA2
- เครื่องกำเนิดสปริง pilkopodibnoy DA6
- dzherela .เพิ่มเติม DA 5, DA 7, DA8
องค์ประกอบทั้งหมด รวมทั้งทรานซิสเตอร์อิเล็กทรอนิกส์ ติดตั้งส่วนดิจิทัล
ไดอะแกรมโฮเวอร์สามชั่วโมงในรูปที่ 3 จะเห็นได้ว่าชั่วขณะของการปรากฏตัวของแรงกระตุ้นที่ชั่วร้าย วิธีการควบคุม และความเล็กน้อยของกระบวนการเริ่มต้นด้วยการปรากฏตัวขององค์ประกอบที่เป็นตรรกะ DD1. ตรรกะของ Reshta ไม่พร้อมใช้งานสำหรับฟังก์ชันเพิ่มเติม การแบ่งย่อยของแรงกระตุ้นเอาต์พุตสำหรับสองช่องสัญญาณ ตัวสะสมและตัวปล่อยอาจมองเห็นความผิดของทรานซิสเตอร์ ดังนั้นคุณจึงสามารถเชื่อมต่อสวิตช์แยกกันได้ เมื่อเปิดใช้งานจากโปรแกรมจำลองหน้าแรก wikid จะถูกชี้ลงสู่ระดับบวก І จากวิกินักสะสมรวมไปจนถึงภูเขา DD 2 єไดนามิกสองจังหวะดี-ทริกเกอร์ หลักการของหุ่นยนต์โยโกในการรุก DD 1 พร้อมทริกเกอร์รีเมคด้านหน้าเชิงลบของตัวเอง DD2 і cim เปลี่ยนช่องทางในการส่งแรงกระตุ้นที่น่ารังเกียจเพื่อให้แรงกระตุ้นการสั่นสองครั้งจะปรากฏขึ้นในช่วงเวลาหนึ่งของหุ่นยนต์
ส่วนดิจิตอล
หุ่นยนต์สามารถเข้าใจช่วงเวลาหนึ่งของเส้นทางดิจิทัล (div. รูปที่ 3) DD 2 สำหรับก้น Q єเป็นตรรกะอย่างหนึ่ง แต่ในอีกทางหนึ่ง /คิว ศูนย์ตรรกะที่อินพุตทั้งสอง DD 3 เยี่ยมชมหนึ่งตอนนี้ในระหว่างการเดินทาง DD 5 จะเป็นศูนย์ตรรกะเพราะ ออกจากทาง DD 5 สามารถแก้ไขได้เป็นหนึ่งเดียวเท่านั้นในทั้งสองอินพุต DD 5 แฮงค์ศูนย์ ทำให้ทรานซิสเตอร์ VT5 จะปิด. กลายเป็น vihodu DD 4 จะมีศูนย์ตรรกะซึ่งมาที่หนึ่งในปัจจัยการผลิต DD6 ด้วยตัวเอง ความเป็นไปได้ที่จะส่งชีพจรผ่านช่องสัญญาณล่าง พัลส์ขาออกปรากฏบนทรานซิสเตอร์ VT 2 pd ชั่วโมงหยุดชั่วคราวระหว่างพัลส์ที่ใช้งานอยู่ขององค์ประกอบ DD 1. (tobto เป็นเวลาหนึ่งชั่วโมงหากอยู่ในvyhodі DD 1 ไดอะแกรมช่วงศูนย์เสื้อ 1- t2). หูขององค์ประกอบแรงกระตุ้นที่น่ารังเกียจ DD 1 (ชั่วขณะ t 2 ไดอะแกรม) ไม่เปลี่ยนมาตรฐานขององค์ประกอบในเส้นทางดิจิทัลของ microcircuit ยกเว้นองค์ประกอบ DD 6 ที่เอาต์พุตของศูนย์ตรรกะ ทรานซิสเตอร์ VT2 ระยะใกล้. เสร็จสิ้นพัลส์เอาต์พุต DD1 (โมเมนต์ t3) เพื่อซูมเข้าที่เอาต์พุต DD2 ที่ฝั่งตรงข้าม สิ่งนี้จะเปลี่ยนแคมป์ขององค์ประกอบ DD3, DD4 มีการหยุดชั่วคราวในขณะที่เอาต์พุต DD1 พัลส์อินพุตถูกซูมไปตามช่องสัญญาณด้านบน ในระดับดังกล่าว แนวคิดพื้นฐานของหุ่นยนต์ในเส้นทางดิจิทัลของภาคสนามคือความไม่สำคัญของแรงกระตุ้นขาออกเริ่มต้นด้วยการหยุดชั่วคราวเล็กน้อยระหว่างแรงกระตุ้นขาออก DD1 microcircuits เป็นวงจรตรรกะ จากนั้นทรานซิสเตอร์ VT1 และ VT2 จะมีความล้มเหลวเพียงเฟสเดียวในครึ่งระยะเวลา โหมดดังกล่าวของหุ่นยนต์ vikoristovutsya ใน vipadu นั้นเช่น vikonan แหล่งจ่ายไฟของหุ่นยนต์สำหรับวงจรสองจังหวะ หากภาษี nizhku 13 เป็นศูนย์ตรรกะ องค์ประกอบของ microcircuit DD3 และ DD4 จะถูกบล็อก tobto ประเทศของїхvikhodіvไม่เปลี่ยนแปลง แรงกระตุ้นบินตามเฟสโดยไม่ชักช้า โหมดหุ่นยนต์ดังกล่าวจะได้รับชัยชนะ เช่นเดียวกับส่วนกำลังของหน่วยที่อยู่อาศัยของ viconan สำหรับวงจรรอบเดียว ด้วยสำนึกของตัวสะสมและอาร์เรย์ของทรานซิสเตอร์รวมกับวิธีการจ่ายไฟ
ส่วนอะนาล็อก
เอาต์พุตของ DD1 ถูกตั้งค่าเป็นสัญญาณเอาต์พุตของตัวเปรียบเทียบ PWM DA2 ของไดอะแกรม 4 ซึ่งไปที่หนึ่งในอินพุตของ DD1 สัญญาณเอาท์พุตของตัวเปรียบเทียบ DA1 (แผนภาพ 2) ซึ่งมาถึงหนึ่งในอินพุต DD1 จะไม่ไหลเข้าสู่โหมดหุ่นยนต์ปกติ ดังนั้นสัญญาณเอาต์พุตของตัวเปรียบเทียบ PIM DA2 จึงกว้างขึ้น นอกจากนี้ เป็นที่ชัดเจนว่าเมื่อเปลี่ยนระดับ แรงกดบนอินพุตโดยตรงของตัวเปรียบเทียบ DA 2 ความกว้างของพัลส์เอาต์พุตจะแปรผันตามสัดส่วน โหมดปกติมีความเครียดที่อินพุต DA 2 กล่าวคือ DA 3 เพราะ Wono perevischu rіvennarugi DA4. เมื่อสัญญาณได้รับเสียงเรียกเข้าที่ 1 pershu ของ microcircuit และแรงดันไฟฟ้าที่อินพุตของตัวเปรียบเทียบ PWM จะเปลี่ยนไป ไดอะแกรม 3 ชั่วโมงของ vipliv ซึ่งก็คือความกว้างของ vip pulses DA ด้วยเหตุผล 2 ประการจะมีการเปลี่ยนแปลงการควบคุมจะถูกโอนไปยังตัวเปรียบเทียบ "dead zone" DA 1. ช่วงเวลาที่ไม่ปลอดภัยที่สุดของวงจรไมโครหุ่นยนต์ є ขณะนั้น หากอินพุตโดยตรง DA1 เพื่อแขวนศักยภาพซึ่งก็คือ “0” และ tse หมายความว่าแรงกระตุ้นkeruyuchіจะเป็นจริงทีละตัว อาจเป็นเพราะสถานการณ์ภายใต้ชื่อ "การพังทลายของแรงดันทรานซิสเตอร์" สถานการณ์หากทรานซิสเตอร์ตัวใดตัวหนึ่งยังไม่คด แต่อีกตัวเปิดอยู่แล้ว ขดลวดของหม้อแปลงไฟฟ้าไม่ได้ถูกล้อมรอบด้วยดีด ร่องรอยของสถานการณ์ทั่วไปที่น่าเศร้าตามกฎแล้วให้หลีกเลี่ยง vypryamlyach ตัวเดียวรวมถึงไปให้พ้นทางปุ่มเปิดปิดของอินเวอร์เตอร์ สำหรับเป้าหมาย qih ก่อนโครงร่างของ bulo จะรวมสปริง dzherelo ภายในไว้ด้วย DA7 (0.1).
(ไม่ใช่ TDA1555 แต่เป็นไมโครเซอร์กิตแบบอนุกรมมากกว่า) และการพับที่นี่คือไวน์ เพราะมันไม่ได้อยู่ใน UMZCH เอง แต่อยู่ในภาคผนวก ซึ่งผลักดันจนไปถึงระดับที่ต้องการ ส่งสัญญาณดีดที่ดีในการติดตั้ง Tsey perevoryuvach є nyvazhcha ส่วนหนึ่งของ pidsilyuvach ที่ทำเอง อย่างไรก็ตาม ด้วยการยืนยันคำแนะนำทั้งหมด คุณสามารถใช้รูปแบบที่กำหนดเพื่อย้อนกลับ PN ซึ่งเป็นรูปแบบที่ชี้ด้านล่าง Schob zbіlshiti - คลิกที่ไม่มี
พื้นฐานของการสร้างใหม่คือเครื่องกำเนิดของแรงกระตุ้น สิ่งจูงใจสำหรับการขยายตัวพิเศษของไมโครเซอร์กิต ความถี่ของการสร้างถูกกำหนดโดยค่าเล็กน้อยของตัวต้านทาน R3 สามารถเปลี่ยนได้โดยให้หุ่นยนต์และ KKD มีความเสถียรสูงสุด รายงานเกี่ยวกับสิ่งที่แนบมาของ microcircuit TL494 นั้นเข้าใจง่าย
พารามิเตอร์ของไมโครเซอร์กิต TL494
Upit.mіcircuits (visnovok 12) - Upіt.min = 9V; Upit.max = 40V
ความเครียดที่อนุญาตในอินพุต DA1, DA2 ไม่เกิน Upit / 2
พารามิเตอร์ที่อนุญาตของทรานซิสเตอร์เอาท์พุท Q1, Q2:
เราน้อยกว่า 1.3V;
Uke น้อยกว่า 40V;
Ik.max น้อยกว่า 250mA
Zalishkova napruga collector-emmeter ของทรานซิสเตอร์เอาท์พุตมากกว่า 1.3V สามตัว
ฉันกับ microcircuit - 10-12mA
อนุญาตให้กดดังต่อไปนี้:
0.8W ที่อุณหภูมิสภาพแวดล้อมตรงกลาง + 25C;
0.3W ที่อุณหภูมิของตัวกลางโดยรอบ + 70C
ความถี่ของเครื่องกำเนิดสัญญาณอ้างอิงที่แทรกของ trocha นั้นมากกว่า 100 kHz

- เครื่องกำเนิดแรงตึงเหมือนเลื่อย DA6; ความถี่ขึ้นอยู่กับค่าเล็กน้อยของตัวต้านทานและตัวเก็บประจุที่เชื่อมต่อกับ visnovks ที่ 5 และ 6
- dzherelo รองรับสปริงที่มีความเสถียร DA5 จากอินพุตภายนอก (visnovok 14);
- pidsilyuvach pomilki สำหรับฟองน้ำ DA3;
- pidsilyuvach pomylki สัญญาณ obmezhennya ดีด DA4;
- ทรานซิสเตอร์เอาท์พุทสองตัว VT1 และ VT2 พร้อมตัวสะสมและตัวปล่อยแบบเปิด
- ตัวเปรียบเทียบ "เดดโซน" DA1;
- เครื่องเปรียบเทียบ PWM DA2;
- D-trigger สองจังหวะแบบไดนามิกในโหมดความถี่ 2 - DD2;
- องค์ประกอบลอจิกเพิ่มเติม DD1 (2-ABO), DD3 (2nd), DD4 (2nd), DD5 (2-ABO-NOT), DD6 (2-ABO-NOT), DD7 (NOT);
- dzherelo สปริงถาวรที่มีชื่อ 0.1B DA7;
- dzherelo post_st_trumu іz nom_ninalom 0.7mA DA8

Rzgoyuyut navantazhennya (หม้อแปลงไฟฟ้า) polov_ ทรานซิสเตอร์ IRFZ44N. เค้น L1 ของขดลวดบนวงแหวนเฟอร์ไรท์ที่มีเส้นผ่านศูนย์กลาง 2 ซม. จากบล็อกคอมพิวเตอร์ วาง 10 รอบด้วยลวดคู่ที่มีเส้นผ่านศูนย์กลาง 1 มม. ซึ่งเป็นดอกกุหลาบทั่วทั้งวงกลม หากคุณมีเงินเป็นจำนวนมาก คุณสามารถม้วนผมบนทรงผมที่มั่นใจได้ที่มีเส้นผ่านศูนย์กลาง 8 มม. และสองเซนติเมตร (ไม่สำคัญ) เบบี้ เพย์ ที่ รูปแบบเลย์ - แอดอิน

Poperejaєmoเนื่องจากการออกแบบหม้อแปลงที่ถูกต้อง ประสิทธิภาพของหน่วยแปลงควรเพิ่มขึ้นอย่างมาก ลุ้นห้อยแหวนฟีไรต์แบรนด์ 2000NM ขนาด 40*25*11 มม. มีความจำเป็นต้องปัดเศษขอบทั้งหมดด้วยไฟล์แล้วห่อด้วยผ้าลินิน izolenta ขดลวดปฐมภูมินั้นพันด้วย jgut ซึ่งเก็บไว้ใน 5 คอร์ด้วยขนาด 0.7 มม. และ 2 * 6 รอบ, ถึง 12.5 คอร์ บน visnovki เรามีชีวิตอยู่เพื่อขดตัว ให้เรากรอการกรอเดิมครึ่งหนึ่งเป็นอีกครึ่งหนึ่งของการกรอเดิมในลำดับเดียวกัน Otrimuєmoสองขดลวดเท่ากัน เมื่อม้วนที่สองด้วยลวดขนาด 1.5 มม. 2 * 18 รอบ ก็เหมือนกับเส้นแรก ในการสตาร์ทเครื่องครั้งแรกมันไม่หมดไฟจำเป็นต้องเปิดสวิตช์ผ่านตัวต้านทาน 100 โอห์มที่ไหล่ของผิวหนังและการเชื่อมต่อแรกของหม้อแปลงไฟฟ้าผ่านหลอดไฟ 40-60 วัตต์และทุกอย่างจะ จะหึ่งสำหรับเอิกเกริกบางอย่าง ข้อมูลเสริมเล็กน้อย: บล็อกวงจรของตัวกรองมีข้อบกพร่องเล็กน้อย ควรจดจำรายละเอียดตั้งแต่ 19 ถึง 22 อย่างละเอียด เนื่องจากเมื่อเฟสถูกพันบนออสซิลโลกราฟ แอมพลิจูดของสัญญาณจะดับลง คุณสามารถแนะนำให้ทำซ้ำได้อย่างง่ายดายเนื่องจากสามารถหาผู้ชนะโดยนักวิทยุสมัครเล่นได้สำเร็จ