ස්පන්දන උත්පාදක යන්ත්රය ඉලෙක්ට්රොනික උපකරණ සංවර්ධනය කිරීම හා සකස් කිරීම පිළිබඳ රසායනාගාර පර්යේෂණ සඳහා යොදා ගනී. උත්පාදක යන්ත්රය වෝල්ට් 7 සිට 41 දක්වා වෝල්ටීයතා පරාසයක ක්රියාත්මක වන අතර ප්රතිදාන ට්රාන්සිස්ටරය මත පදනම්ව ඉහළ බර ධාරිතාවක් ඇත. නිමැවුම් ස්පන්දනවල විස්තාරය මෙම මයික්\u200dරො චක්\u200dරීය +41 V හි සැපයුම් වෝල්ටීයතාවයේ සීමිත අගය දක්වා මයික්\u200dරෝ චක්\u200dරයේ සැපයුම් වෝල්ටීයතාවයේ වටිනාකමට සමාන විය හැකිය. එහි පදනම සෑම කෙනෙකුටම දන්නා අතර බොහෝ විට භාවිතා වේ.

ප්\u200dරතිසම ටීඑල් 494 ක්ෂුද්\u200dර පරිපථ වේ KA7500 සහ ඇගේ ගෘහස්ථ ක්ලෝනය - KR1114EU4 .
පරාමිතීන්ගේ අගයන් සීමා කරන්න:
සැපයුම් වෝල්ටීයතාව 41V
ඇම්ප්ලිෆයර් ආදාන වෝල්ටීයතාවය (Vcc + 0.3) V.
එකතු කරන්නාගේ නිමැවුම් වෝල්ටීයතාව 41V
එකතු කරන්නාගේ නිමැවුම් ධාරාව 250mA
අඛණ්ඩ මාදිලියේ 1W හි සම්පූර්ණ බලය විසුරුවා හැරීම
සංසරණ මෙහෙයුම් උෂ්ණත්ව පරාසය:
-c උපසර්ගය L -25..85С
-0..70С උපසර්ගය සමඟ
ගබඩා උෂ්ණත්ව පරාසය -65 ... + 150 සී
උපාංගයේ ක්\u200dරමානුරූප සටහන

සෘජුකෝණාස්රාකාර ස්පන්දන උත්පාදක පරිපථය
උත්පාදක PCB සක්\u200dරීයයි ටීඑල් 494 සහ අනෙකුත් ලිපිගොනු වෙනමම ඇත.

සංඛ්\u200dයාතය පාලනය කරනු ලබන්නේ ස්විච් එස් 2 (රළු) සහ ප්\u200dරතිරෝධක ආර්වී 1 (සුමටව), තීරු චක්\u200dරය ප්\u200dරතිරෝධක ආර්වී 2 මගින් පාලනය වේ. ස්විච් SA1 උත්පාදක යන්ත්රයේ මෙහෙයුම් මාතයන් අදියර (තනි අන්තයේ) සිට ප්\u200dරති-අවධිය (තල්ලු-අදින්න) දක්වා වෙනස් කරයි. ප්\u200dරතිරෝධක R3 වඩාත් ප්\u200dරශස්ත අතිච්ඡාදනය සංඛ්\u200dයාත පරාසය තෝරා ගනී, තීරු චක්\u200dරීය ගැලපුම් පරාසය ප්\u200dරතිරෝධක R1, R2 සමඟ තෝරා ගත හැකිය.

ස්පන්දන උත්පාදක කොටස්
කාල පරිපථයේ ධාරිත්\u200dරක C1-C4 අවශ්\u200dය සංඛ්\u200dයාත පරාසය සඳහා තෝරාගෙන ඇති අතර ඒවායේ ධාරිතාව අධෝරක්ත-අඩු උප පරාසය සඳහා මයික්\u200dරොෆරාඩ් 10 සිට ඉහළම සංඛ්\u200dයාතය සඳහා පිකෝෆරාඩ් 1000 දක්වා විය හැකිය.
සාමාන්\u200dය ධාරාව 200 mA ට සීමා වූ විට, පරිපථයට ඉක්මනින් ගේට්ටුව ආරෝපණය කළ හැකිය, නමුත්
ක්\u200dරියා විරහිත ට්\u200dරාන්සිස්ටරය සමඟ එය විසර්ජනය කළ නොහැක. භූගත ප්\u200dරතිරෝධකයක් සහිත ගේට්ටුව බැහැර කිරීම ද සෑහීමකට පත්විය නොහැකි තරම් මන්දගාමී වේ. මෙම අරමුණු සඳහා ස්වාධීන අනුපූරක පුනරාවර්තකයක් භාවිතා කරයි.

- කියවන්න: "පරිගණකයකින් සාදා ගන්නේ කෙසේද".
සංඛ්\u200dයාතය සහ රාජකාරි චක්\u200dර පාලනය සහිත TL494 හි උත්පාදක යන්ත්රය
අත්හදා බැලීම් සහ සුසර කිරීමේ කටයුතු සඳහා ඉතා ප්\u200dරයෝජනවත් උපාංගයක් වන්නේ සංඛ්\u200dයාත උත්පාදක ය. ඒ සඳහා වන අවශ්\u200dයතා කුඩා ය, ඔබට අවශ්\u200dය වන්නේ:
- සංඛ්\u200dයාත ගැලපුම (ස්පන්දන පුනරාවර්තන කාලය)
- රාජකාරි චක්\u200dර ගැලපුම (රාජකාරි චක්\u200dරය, ස්පන්දන දිග)
- පුළුල් පරාසය
උත්පාදක යන්ත්රයේ සංඛ්යාත ගැලපුම් පරාසය අතිශයින් ඉහළ ය - හර්ට්ස් දස සිට 500 kHz දක්වා, සහ සමහර අවස්ථාවල - 1 MHz දක්වා, ක්ෂුද්ර චක්රය මත පදනම්ව, විවිධ නිෂ්පාදකයින්ට මිරිකා ගත හැකි උපරිම සංඛ්යාතයේ විවිධ තාත්වික අගයන් ඇත. පිටතට.

පරිපථයේ විස්තරය වෙත යමු:
පිට් ± සහ පිට් ~ - නියත හා ප්\u200dරත්\u200dයාවර්ත වෝල්ටීයතාවයකින් යුත් පරිපථයේ ඩිජිටල් කොටසෙහි බල සැපයුම පිළිවෙලින් වෝල්ට් 16-20 කි.
Vout - බල සැපයුම් වෝල්ටීයතාවය, එය වෝල්ට් 12 සිට උත්පාදක නිමැවුමේ වේ. මෙම වෝල්ටීයතාවයෙන් පරිපථයේ ඩිජිටල් කොටස බල ගැන්වීම සඳහා ධ්\u200dරැවීයතාව (වෝල්ට් 16 සිට) සැලකිල්ලට ගනිමින් Vout සහ Pit සම්බන්ධ කිරීම අවශ්\u200dය වේ.
OUT (+ / D) - ධ්\u200dරැවීයතාව සැලකිල්ලට ගනිමින් උත්පාදක බල ප්\u200dරතිදානය. + - බල සැපයුම් ප්ලස්, ඩී - ක්ෂේත්\u200dර බලපෑම් ට්\u200dරාන්සිස්ටරයේ කාණු. බර ඔවුන් හා සම්බන්ධ වේ.
G D S - ක්ෂේත්\u200dර ආචරණ ට්\u200dරාන්සිස්ටරයක් \u200b\u200bසම්බන්ධ කිරීම සඳහා ඉස්කුරුප්පු ඇණ, සංඛ්\u200dයාතය සහ බලය සඳහා ඔබේ අවශ්\u200dයතා අනුව පරාමිතීන් අනුව තෝරා ගනු ලැබේ. නිමැවුම් ස්විචය සඳහා කොන්දොස්තරවරුන්ගේ අවම දිග සහ ඒවායේ අවශ්\u200dය පළල සැලකිල්ලට ගනිමින් මුද්\u200dරිත පරිපථ පුවරුවේ සැකැස්ම සකස් කර ඇත.
පාලක මණ්ඩල:
Rt යනු ජනක යන්ත්\u200dරයේ සංඛ්\u200dයාත පරාසය පාලනය කිරීම සඳහා විචල්\u200dය ප්\u200dරතිරෝධකයකි, ඔබේ නිශ්චිත අවශ්\u200dයතා අනුව එහි ප්\u200dරතිරෝධය තෝරා ගත යුතුය. TL494 සංඛ්\u200dයාතය ගණනය කිරීම සඳහා මාර්ගගත කැල්කියුලේටරයක් \u200b\u200bපහත අමුණා ඇත. ප්\u200dරතිරෝධක R2 මයික්\u200dරො චක්\u200dරයේ කාල ප්\u200dරතිරෝධකයේ අවම ප්\u200dරතිරෝධය සීමා කරයි. එය ක්ෂුද්\u200dර චක්\u200dරයේ නිශ්චිත අවස්ථාවක් සඳහා තෝරා ගත හැකිය, නැතහොත් එය රූප සටහනේ පරිදි සැකසිය හැකිය.
Ct - සංඛ්\u200dයාත සැකසීමේ ධාරිත්\u200dරකය, නැවතත්, මාර්ගගත කැල්කියුලේටරය වෙත යොමු කරයි. ඔබගේ අවශ්\u200dයතාවන්ට ගැලපෙන පරිදි ගැලපුම් පරාසය සැකසීමට ඔබට ඉඩ දෙයි.
Rdt - රාජකාරි චක්\u200dර ගැලපුම සඳහා විචල්\u200dය ප්\u200dරතිරෝධකය. ගැලපුම් පරාසය 1% සිට 99% දක්වා මනාව සැකසීමට ප්\u200dරතිරෝධක R1 භාවිතා කළ හැකි අතර ඒ වෙනුවට ඔබට ජම්පර් එකක් ද තැබිය හැකිය.
| Ct, nF: | |
| R2, kOhm: | |
| Rt, kOhm: |
පරිපථයේ ක්රියාකාරිත්වය පිළිබඳ වචන කිහිපයක්. මයික්\u200dරො සර්කිට් (නිමැවුම් පාලනය) හි 13 වන නිමැවුමට අඩු මට්ටමක් සැපයීමෙන් එය තනි චක්\u200dරීය මාදිලියකට මාරු කරනු ලැබේ. සංඛ්\u200dයාත මීටරයක් \u200b\u200b(සංඛ්\u200dයාත මීටරය) උත්පාදක යන්ත්\u200dරයට සම්බන්ධ කිරීම සඳහා ප්\u200dරතිදානයක් නිර්මාණය කිරීම සඳහා මයික්\u200dරො චක්\u200dරයේ පහළ ට්\u200dරාන්සිස්ටරය ප්\u200dරතිරෝධක R3 මත පටවනු ලැබේ. මයික්\u200dරො චක්\u200dරයේ ඉහළ ට්\u200dරාන්සිස්ටරය මඟින් අනුපූරක ට්\u200dරාන්සිස්ටර යුගලයක් වන එස් 8050 සහ එස් 8550 මත ධාවකයක් පාලනය කරයි, එහි කාර්යය වන්නේ බල ප්\u200dරතිදාන ට්\u200dරාන්සිස්ටරයේ ගේට්ටුව පාලනය කිරීමයි. ප්\u200dරතිරෝධක R5 ගේට්ටු ධාරාව සීමා කරයි, එහි අගය වෙනස් කළ හැකිය. චෝක් එල් 1 සහ 47 එන් ධාරිත්\u200dරකය මඟින් ටීඑල් 494 රියදුරුගේ ඇඟිලි ගැසීම් වලින් ආරක්ෂා කිරීම සඳහා පෙරනයක් සාදයි. චෝක් ප්\u200dරේරණය ඔබේ සංඛ්\u200dයාත පරාසයට අනුරූප විය යුතුය. S8050 සහ S8550 ට්\u200dරාන්සිස්ටර අහම්බෙන් තෝරා නොගත් බව සැලකිල්ලට ගත යුතුය, මන්ද ඒවාට ප්\u200dරමාණවත් බලයක් හා වේගයක් ඇති බැවින් එමඟින් පෙරමුණු වල අවශ්\u200dයතාවය වැඩි වේ. ඔබට පෙනෙන පරිදි, යෝජනා ක්රමය අතිශයින්ම සරල වන අතර ඒ සමඟම ක්රියාකාරී වේ.
විචල්ය ප්\u200dරතිරෝධක Rt ශ්\u200dරේණියට සම්බන්ධ ප්\u200dරතිරෝධක දෙකක ස්වරූපයෙන් සෑදිය යුතුය - ඔබට සංඛ්\u200dයාත පාලනයේ සුමටතාවය සහ නිරවද්\u200dයතාවය අවශ්\u200dය නම් තනි හැරීම සහ බහු හැරීම.
සම්ප්\u200dරදාය අනුගමනය කරමින් මුද්\u200dරිත පරිපථ පුවරුව,
මම ගුවන්විදුලි ඉලෙක්ට්\u200dරොනික උපකරණ කිරීමට පටන් ගත් විට, මගේ වැඩමුළුව සටහන් පොත්, ගණනය කිරීම් සහිත පත්\u200dරිකා, සූත්\u200dර සහ වෙනත් සියලු දේවලින් පිරී තිබුණි. දැන්, පරිගණකයක් සුඛෝපභෝගී ජීවිතයකින් far ත්ව සිටින විට, ගුවන් විදුලි ආධුනිකයෙකු සඳහා වැඩසටහන් භාවිතා කිරීමෙන් ඔබේ ජීවිතය ටිකක් පහසු කර ගත හැකිය. සියලුම වැඩසටහන් තොරතුරු දැනගැනීම සඳහා ඉදිරිපත් කර ඇති අතර, වැඩසටහන් වල මුල් පිටපත් සංවර්ධකයාගේ වෙබ් අඩවියෙන් බාගත කිරීම නිර්දේශ කරමි
එය විවිධ වර්ගයේ ට්\u200dරාන්ස්ෆෝමර්, චෝක්ස් ගණනය කිරීම සහ හරයේ පාරගම්යතාව තීරණය කිරීම සඳහා විවිධ වැඩසටහන් සමූහයකි. එසේම, චිප්ස් 3525 සහ 3842-3845 සංඛ්\u200dයාතය ගණනය කිරීම
මෙම වැඩසටහන් ලිපි වලින් පෙන්නුම් කර ඇත,
සිට Splan70අබකොම් 
විද්\u200dයුත් පරිපථ ඇඳීම සඳහා වූ වැඩසටහනකි. මෘදුකාංග පැකේජයේ විවිධ ඉලෙක්ට්\u200dරොනික උපාංගවල විශාල දත්ත ගබඩාවක් මෙන්ම ඔබේ සංරචක ඇඳීම සඳහා සංස්කාරකයක් ද ඇත
පරිපථ ඇඳීම සඳහා මම වැඩසටහන සක්\u200dරියව භාවිතා කළෙමි, දැන් මම මේ සඳහා මල්ටිසිම් භාවිතා කරමි
සමාලෝචනය සඳහා වැඩසටහන

පරිපථවල මූලික පරීක්ෂාව සහ ඒවායේ වින්\u200dයාසය සඳහා ඉතා ප්\u200dරබල ඉමුලේටරයක්. මගේ මතකයට එන බොහෝ අදහස්, මම මුලින්ම ඒවා ඉමුලේටරය තුළ සකස් කර, පසුව ඒවා දෘඩාංග මඟින් ක්\u200dරියාත්මක කර අවසානයේ ඒවා වින්\u200dයාස කරමි
මල්ටිසිම් හි විශාල සංරචක පදනමක් ඇති අතර එමඟින් ඕනෑම පරිපථයක් පාහේ අනුකරණය කිරීමට ඔබට ඉඩ සලසයි. බහුමාමකයේ සිට බලවත් ජනක යන්ත්\u200dර දක්වා විවිධ මෙවලම් තිබේ
සංවර්ධකයාගේ වෙබ් අඩවියෙන් වැඩසටහන බාගන්න
ස්ප්රින්ට්ගිහි6 න්අබකොම් 
තනි ඒක පාර්ශවීය සහ ද්විත්ව ඒක පාර්ශවීය මුද්\u200dරිත පරිපථ පුවරු ඇඳීම සඳහා මෙය විශිෂ්ට සංස්කාරකයකි.
මැක්\u200dරෝස් විශාල පදනමක් ඇති බැවින් ඔබටම මැක්\u200dරෝස් එකතු කළ හැකිය
සියලුම මුද්\u200dරිත පරිපථ පුවරු මෙම සංස්කාරකයේ ඇද ඇත
සමාලෝචනය සඳහා වැඩසටහන
ප්\u200dරධාන මෘදුකාංග පැකේජය දැනටමත් විස්තර කර ඇත, මම කලාතුරකින් භාවිතා කරන සුළු වැඩසටහන් ද ඇත, නමුත් තවමත් භාවිතා කරයි

මෙය ප්\u200dරතිරෝධක කේතගත කිරීම සහ වර්ණ සලකුණු කිරීම සඳහා වූ වැඩසටහනකි, මම එය සක්\u200dරියව භාවිතා කිරීමට භාවිතා කළෙමි. දැන් මම සෑම දෙයක්ම හදවතින්ම දනිමි, නමුත් සමහර විට, නිසැකවම, මම මෙම වැඩසටහන සමඟ ප්\u200dරති results ල පරීක්ෂා කරමි
සමාලෝචනය සඳහා වැඩසටහන

ශ්\u200dරව්\u200dය බල ඇම්ප්ලිෆයර් සඳහා ට්\u200dරාන්ස්ෆෝමර් බල සැපයුම ගණනය කිරීමේ වැඩසටහන. ශබ්ද ප්\u200dරජනනය අතරතුර බලශක්ති පරිභෝජනයේ සුවිශේෂතා එය සැලකිල්ලට ගනී
සමාලෝචනය සඳහා වැඩසටහන
නියාමකයආශාව 1.2නසාර් 
වැදගත්ම දේ පමණි.
සැපයුම් වෝල්ටීයතාව 8-35v (එය 40v දක්වා විය හැකි බව පෙනේ, නමුත් එය පරීක්ෂා නොකළේ)
එක්-ආ roke ාත සහ ද්වි-ආ roke ාත ආකාරයන්හි වැඩ කිරීමේ හැකියාව.
තනි චක්\u200dරීය මාදිලිය සඳහා, උපරිම ස්පන්දන කාලය 96% (මිය ගිය කාලය 4% ට නොඅඩු) වේ.
ද්වි-ආ roke ාත අනුවාදය සඳහා, මිය ගිය කාලය 4% ට වඩා අඩු විය නොහැක.
පින් 4 ට 0 ... 3.3V වෝල්ටීයතාවයක් යෙදීමෙන් ඔබට මිය ගිය කාලය වෙනස් කළ හැකිය. සුමට ආරම්භයක් කරන්න.
නිමැවුම් ස්ථායීකරණ වෝල්ටීයතා ප්\u200dරභවයක් 5V සහ 10mA දක්වා ධාරාවක් ඇත.
යටි වෝල්ටීයතාවයට එරෙහිව ගොඩනඟන ලද ආරක්ෂාවක් ඇත, 5.5 ... 7V ට වඩා අඩු වීම (බොහෝ විට 6.4V). කරදරය නම් එවැනි වෝල්ටීයතාවයකදී, මොස්ෆෙට් දැනටමත් රේඛීය මාදිලියට ගොස් දැවී යාමයි ...
Rt (6) pin (14) හෝ Ct (5) pin යතුරකින් බිම සිට වසා දැමීමෙන් මයික්\u200dරො චක්\u200dරීය උත්පාදක යන්ත්රය ක්\u200dරියා විරහිත කළ හැකිය.
වැඩ කරන සංඛ්යාතය 1 ... 300 kHz.
Ku \u003d 70..95 dB වාසියක් සහිත බිල්ට් "දෝෂ" මෙහෙයුම් ඇම්ප්ලිෆයර් දෙකක්. යෙදවුම් - ප්\u200dරතිදාන (1); (2) සහ (15); (16). ඇම්ප්ලිෆයර්වල ප්\u200dරතිදානය OR මූලද්\u200dරව්\u200dයයක් මගින් සම්බන්ධ වේ, එබැවින් වෝල්ටීයතාව වැඩි වන ප්\u200dරතිදානයේ දී ස්පන්දන කාලය පාලනය කරයි. සංසන්දකයාගේ එක් යෙදවුම් සාමාන්\u200dයයෙන් යොමු වෝල්ටීයතාවයට (14) බැඳී ඇති අතර අනෙක - ඔබට අවශ්\u200dය ඕනෑම තැනක ... ඇම්ප්ලිෆයර් තුළ සං signal ා ප්\u200dරමාදය 400ns වේ, ඒවා එක් ඔරලෝසු චක්\u200dරයක් තුළ වැඩ කිරීමට නිර්මාණය කර නැත.
200mA ක සාමාන්\u200dය ධාරාවක් සහිත මයික්\u200dරො චක්\u200dරයේ නිමැවුම් අවධීන් බලවත් මොස්ෆෙට් එකක ගේට්ටුවේ ආදාන ධාරිතාවය ආරෝපණය කරයි, නමුත් එහි විසර්ජනය සපයන්නේ නැත. සාධාරණ කාලයක් සඳහා. මේ සම්බන්ධව, බාහිර ධාවකයක් අවශ්\u200dය වේ.
නිමැවුම් (5) ධාරිත්\u200dරක C2 සහ ප්\u200dරතිදානය (6) ප්\u200dරතිරෝධක R3; R4 - මයික්\u200dරො චක්\u200dරයේ අභ්\u200dයන්තර උත්පාදක යන්ත්\u200dරයේ සංඛ්\u200dයාතය සකසන්න. ද්වි-ආ roke ාත ප්\u200dරකාරයේදී එය 2 න් බෙදිය හැකිය.
සමමුහුර්ත කිරීමේ හැකියාවක් ඇත, ආදාන ස්පන්දන මගින් අවුලුවන.
සංඛ්\u200dයාත හා රාජකාරි චක්\u200dර පාලනය සහිත තනි චක්\u200dර උත්පාදක යන්ත්රය
වෙනස් කළ හැකි සංඛ්\u200dයාතය සහ තීරුබදු චක්\u200dරය සහිත තනි චක්\u200dරීය උත්පාදක යන්ත්රය (ස්පන්දන කාල සීමාව විරාම කාලයට අනුපාතය). එක් ට්\u200dරාන්සිස්ටර ප්\u200dරතිදාන ධාවකයක් සමඟ. පින් 13 පොදු බල බස් රථයකට සම්බන්ධ කර ඇත්නම් මෙම ප්\u200dරකාරය අවබෝධ වේ.
යෝජනා ක්රමය (1)
මයික්\u200dරො චක්\u200dරයට නිමැවුම් අදියර දෙකක් ඇති බැවින්, මෙම අවස්ථාවෙහිදී ප්\u200dරතිදාන ධාරාව වැඩි කිරීම සඳහා ඔබට ඒවා සමාන්තරව සක්\u200dරිය කළ හැකිය ... නැතහොත් සක්\u200dරිය නොකරන්න ... (රූප සටහනෙහි කොළ පැහැයෙන්) ප්\u200dරතිරෝධක R7 ද වේ සැමවිටම ස්ථාපනය කර නැත.
ප්\u200dරතිරෝධක R10 හරහා වෝල්ටීයතාව ඔප්-ඇම්ප් සමඟ මැනීමෙන් ඔබට ප්\u200dරතිදාන ධාරාව සීමා කළ හැකිය. දෙවන ආදානය R5 බෙදුම්කරු විසින් යොමු වෝල්ටීයතාවයකින් සපයනු ලැබේ; ආර් 6. හොඳයි, ඔබ දන්නවා, R10 උණුසුම් වනු ඇත.
දාම සී 6; R11, (3) කකුලේ, වැඩි ස්ථාවරත්වයක් සඳහා තබා ඇති බව දත්ත පත්\u200dරිකාව අසයි, නමුත් එය නොමැතිව ක්\u200dරියා කරයි. ට්\u200dරාන්සිස්ටරය ගෙන npn ව්\u200dයුහය ගත හැකිය.

යෝජනා ක්රමය (2)

යෝජනා ක්රමය (3)
වෙනස් කළ හැකි සංඛ්\u200dයාතය සහ රාජකාරි චක්\u200dරය සහිත තනි චක්\u200dර උත්පාදක යන්ත්රය. ට්\u200dරාන්සිස්ටර් ප්\u200dරතිදාන ධාවක දෙකක් සමඟ (අනුපූරක පුනරාවර්තකය).
මට කුමක් කිව හැකිද? තරංග ආකෘතිය වඩා හොඳය, මාරුවීමේ වේලාවන්හි අස්ථිරයන් අඩු වේ, බර පැටවීමේ ධාරිතාව වැඩි වේ, තාප අලාභය අඩු වේ. මෙය ආත්මීය මතයක් විය හැකි වුවද. ඒත්. දැන් මම භාවිතා කරන්නේ ට්\u200dරාන්සිස්ටර් ධාවකයක් දෙකක් පමණි. ඔව්, ගේට්ටු පරිපථයේ ප්\u200dරතිරෝධකයක් මාරුවීමේ සංක්\u200dරාන්ති වේගය සීමා කරයි.

යෝජනා ක්රමය (4)
මෙහි දී අපට වෝල්ටීයතා නියාමනය සහ වත්මන් සීමා කිරීම් සහිත සාමාන්\u200dය තල්ලුවක් නියාමනය කරන ලද තනි අන්ත පරිවර්තකයක පරිපථයක් ඇත.
වැඩ කිරීමේ ක්\u200dරමය මා විසින් අනුවාද කිහිපයකින් එකලස් කරන ලදී. නිමැවුම් වෝල්ටීයතාවය L1 දඟරයේ හැරීම් ගණන සහ R7 ප්\u200dරතිරෝධකවල ප්\u200dරතිරෝධය මත රඳා පවතී. ආර් 10; ගැලපීමේදී තෝරාගත් R11 ... දඟරයට ඕනෑම දෙයකට තුවාල විය හැකිය. ප්\u200dරමාණය - බලය මත පදනම්ව. මුද්ද, ඩබ්ලිව්-කෝර්, සැරයටිය මත පවා. නමුත් එය සන්තෘප්තියට නොයා යුතුය. එමනිසා, මුද්ද ෆෙරයිට් වලින් සාදා ඇත්නම්, ඔබ පරතරයකින් කපා මැලියම් කළ යුතුය. පරිගණක බල සැපයුම් වලින් විශාල මුදු හොඳ වනු ඇත, ඒවා කපා හැරීමට අවශ්\u200dය නැත, ඒවා "ඉසින යකඩ" වලින් සාදා ඇති අතර පරතරය දැනටමත් සපයා ඇත. හරය W- හැඩැති නම් - අපි චුම්බක නොවන පරතරයක් තබන්නෙමු, සමහර විට කෙටි සාමාන්\u200dය හරයක් සහිතව - මේවා දැනටමත් පරතරයක් ඇත. කෙටියෙන් කිවහොත්, අපි එය thick න තඹ හෝ සවිකරන කම්බියකින් (0.5-1.0 මි.මී., බලය මත පදනම්ව) හරවන අතර හැරීම් ගණන 10 හෝ ඊට වැඩි වේ (අපට ලබා ගැනීමට අවශ්\u200dය වෝල්ටීයතාවය අනුව). අපි සැලසුම් කළ අඩු බල වෝල්ටීයතාවයට භාරය සම්බන්ධ කරමු. අපි බලවත් පහනක් හරහා අපගේ නිර්මාණය බැටරියට සම්බන්ධ කරමු. ලාම්පුව පූර්ණ තාපදීප්තව දැල්වෙන්නේ නැත්නම්, අපි වෝල්ට්මීටරයක් \u200b\u200bසහ දෝලන දර්ශනයක් ගන්නෙමු ...
අපි ප්\u200dරතිරෝධක R7 තෝරා ගනිමු; ආර් 10; R11 සහ දඟරයේ L1 වාර ගණන, බර හරහා අපේක්ෂිත වෝල්ටීයතාවය සාක්ෂාත් කර ගනී.
Choke Dr1 - 5 ... 10 ඕනෑම හරයක් මත wire න වයරයක් සමඟ හැරේ. එකම හරය මත L1 සහ Dr1 තුවාල වී ඇති විකල්ප පවා මම දුටුවෙමි. මම එය මා විසින්ම පරීක්ෂා කළේ නැත.

යෝජනා ක්රමය (5)
මෙය සැබෑ බූස්ට් පරිවර්තක පරිපථයකි, උදාහරණයක් ලෙස කාර් බැටරියෙන් ලැප්ටොප් එකක් ආරෝපණය කිරීම. යෙදවුම්වල සංසන්දකය (15); (16) “පරිත්යාගශීලියාගේ” බැටරියේ වෝල්ටීයතාවය නිරීක්ෂණය කරන අතර එය හරහා ඇති වෝල්ටීයතාවය තෝරාගත් සීමාවට වඩා පහත වැටෙන විට පරිවර්තකය ක්\u200dරියා විරහිත කරයි.
දාම සී 8; ආර් 12; VD2 - ඊනියා ස්නූබර්, ප්\u200dරේරක විමෝචනය මැඩපැවැත්වීම සඳහා නිර්මාණය කර ඇත. අඩු වෝල්ටීයතා MOSFET ඉතිරි කරයි, උදාහරණයක් ලෙස IRF3205 ඔරොත්තු දෙයි, මා වරදවා වටහා නොගන්නේ නම් (කාණු - ප්\u200dරභවය) 50V දක්වා. කෙසේ වෙතත්, එය කාර්යක්ෂමතාව බෙහෙවින් අඩු කරයි. දියෝඩය සහ ප්\u200dරතිරෝධකය යන දෙකම විනීතව රත් වේ. මෙය විශ්වසනීයත්වය වැඩි කරයි. සමහර මාතයන් (පරිපථ) තුළ, එය නොමැතිව බලවත් ට්\u200dරාන්සිස්ටරයක් \u200b\u200bවහාම දැවී යයි. සමහර විට එය මේ සියල්ල නොමැතිව ක්\u200dරියා කරයි ... ඔබ දෝලනය දෙස බැලිය යුතුය ...

යෝජනා ක්රමය (6)
ද්වි-ආ roke ාත මාස්ටර් දෝලනය.
විවිධ අනුවාදයන් සහ ගැලපීම්.
බැලූ බැල්මට, විවිධාකාර සම්බන්ධතා යෝජනා ක්\u200dරම සැබවින්ම වැඩ කරන ප්\u200dරමාණයට වඩා නිහතමානී වේ ... "උපක්\u200dරමශීලී" යෝජනා ක්\u200dරමයක් දකින විට මම සාමාන්\u200dයයෙන් කරන පළමු දෙය නම් මට හුරුපුරුදු ප්\u200dරමිතියෙන් නැවත ඇඳීමයි. මීට පෙර එය GOST ලෙස හැඳින්විණි. සංජානනය අතිශයින් දුෂ්කර වන පරිදි ඔවුන් අඳින්නේ කෙසේද යන්න දැන් පැහැදිලි නැත. වැරදි සඟවයි. මම හිතන්නේ මෙය බොහෝ විට සිදු කරනු ලබන්නේ අරමුණක් ඇතුවයි.
අර්ධ පාලම හෝ පාලම සඳහා ප්\u200dරධාන උත්පාදක යන්ත්රය. මෙය සරලම උත්පාදක ය, ස්පන්දන කාලසීමාව සහ සංඛ්\u200dයාතය අතින් සකස් කළ හැකිය. (3) කකුලේ ඇති දෘෂ්ටි කෝප්ලර් ද කාලසීමාව වෙනස් කළ හැකි නමුත් ගැලපුම ඉතා තියුණු ය. මම ඉස්සර චක්\u200dරයට බාධා කළා. සමහර "ලුමිනියර්ස්" පවසන්නේ (3) ප්\u200dරතිදානය මගින් පාලනය කළ නොහැකි බවයි, මයික්\u200dරො චක්\u200dරය දැවී යනු ඇත, නමුත් මගේ අත්දැකීම් මඟින් කාර්යක්ෂමතාව තහවුරු කරයි මෙම තීරණය... මාර්ගය වන විට, එය වෙල්ඩින් ඉන්වර්ටරයක සාර්ථකව භාවිතා කරන ලදී.
නිකොලායි පෙට්\u200dරුෂොව්
TL494, මේ "මෘගයා" යනු කුමක්ද?
TL494 (ටෙක්සාස් ඉන්ස්ටූම්ස්) බොහෝ විට වඩාත් පොදු පීඩබ්ලිව්එම් පාලකය වන අතර, එහි පදනම මත පරිගණක බල සැපයුම්වලින් සහ විවිධ ගෘහ උපකරණවල බල කොටස් වලින් වැඩි ප්\u200dරමාණයක් නිර්මාණය විය.
දැන් පවා, මෙම මයික්\u200dරො චක්\u200dරය මාරුවීමේ බල සැපයුම් ඉදිකිරීමේ යෙදී සිටින ගුවන් විදුලි ආධුනිකයන් අතර බෙහෙවින් ජනප්\u200dරියය. මෙම මයික්\u200dරො චක්\u200dරයේ ගෘහස්ථ ප්\u200dරතිසමය М1114ЕУ4 (КР1114ЕУ4) වේ. මීට අමතරව, විවිධ විදේශීය සමාගම් විවිධ නම් වලින් මෙම මයික්\u200dරො චක්\u200dරය නිපදවයි. උදාහරණයක් ලෙස IR3M02 (තියුණු), KA7500 (සැම්සුන්), MB3759 (ෆුජිට්සු). මේ සියල්ලම එකම මයික්\u200dරො චක්\u200dරීය ය.
ඇගේ වයස TL431 ට වඩා බෙහෙවින් බාලයි. එය 90 දශකයේ අග භාගයේ - 2000 දශකයේ මුල් භාගයේ ටෙක්සාස් උපකරණ විසින් නිෂ්පාදනය කිරීමට පටන් ගත්තේය.
ඇය යනු කුමක්ද සහ එය කුමන ආකාරයේ "මෘගයා" දැයි සොයා ගැනීමට අපි එක්ව උත්සාහ කරමු. අපි TL494 චිපය (ටෙක්සාස් උපකරණ) සලකා බලමු.
ඉතින්, පළමුව, අපි ඇය තුළ ඇති දේ බලමු.
සංයුතිය.
එයට ඇතුළත් වන්නේ:
- sawtooth වෝල්ටීයතා උත්පාදක යන්ත්රය (GPN);
- මිය ගිය කාල ගැලපුම් සංසන්දකය (DA1);
- පීඩබ්ලිව්එම් ගැලපුම් සංසන්දකය (ඩීඒ 2);
- දෝෂ ඇම්ප්ලිෆයර් 1 (DA3), ප්\u200dරධාන වශයෙන් වෝල්ටීයතාව සඳහා භාවිතා කරයි;
- දෝෂ සීමා කිරීමේ සං signal ාව ප්\u200dරධාන වශයෙන් භාවිතා කරන දෝෂ ඇම්ප්ලිෆයර් 2 (DA4);
- බාහිර පින් 14 සමඟ 5V හි ස්ථාවර යොමු වෝල්ටීයතා ප්\u200dරභවය (ION);
- නිමැවුම් අවධියේ පාලන පරිපථය.
ඇත්ත වශයෙන්ම, අපි එහි සියලුම සං parts ටක කොටස් සලකා බලා මේ සියල්ල සඳහා කුමක් සහ එය ක්\u200dරියාත්මක වන්නේ කෙසේද යන්න සොයා බැලීමට උත්සාහ කරමු, නමුත් පළමුව එහි මෙහෙයුම් පරාමිතීන් (ලක්ෂණ) ගෙන ඒමට අවශ්\u200dය වනු ඇත.
| විකල්ප | අවම | උපරිම. | ඒකකය ගරු. |
| V CC සැපයුම් වෝල්ටීයතාවය | 7 | 40 | තුල |
| ඇම්ප්ලිෆයර් ආදානයේ V I වෝල්ටීයතාවය | -0,3 | V CC - 2 | තුල |
| V O එකතු කරන්නාගේ වෝල්ටීයතාවය | 40 | තුල | |
| එකතු කරන්නා ධාරාව (එක් එක් ට්\u200dරාන්සිස්ටරය) | 200 | mA | |
| ප්\u200dරතිපෝෂණ ධාරාව | 0,3 | mA | |
| f OSC ඔස්කිලේටර් සංඛ්\u200dයාතය | 1 | 300 | kHz |
| C T උත්පාදක ධාරිත්\u200dරකයේ ධාරිතාව | 0,47 | 10000 | nF |
| ආර් ටී උත්පාදක ප්\u200dරතිරෝධක ප්\u200dරතිරෝධය | 1,8 | 500 | kOhm |
| T A මෙහෙයුම් උෂ්ණත්වය TL494C TL494I |
0 | 70 | . සී |
| -40 | 85 | . සී |
එහි සීමිත ලක්ෂණ පහත පරිදි වේ;
සපයන වෝල්ටීයතාවය................................................ ..... 41 බී
ඇම්ප්ලිෆයර් ආදාන වෝල්ටීයතාවය .................................... (Vcc + 0.3) V.
එකතු කරන්නාගේ නිමැවුම් වෝල්ටීයතාවය ................................ 41V
එකතු කරන්නාගේ නිමැවුම් ධාරාව ............................................. 250mA
අඛණ්ඩ මාදිලියේ සම්පූර්ණ බලය විසුරුවා හැරීම .... 1W
මයික්\u200dරො චක්\u200dරයේ අල්තාරවල පිහිටීම සහ අරමුණ.

නිගමනය 1
දෝෂ ඇම්ප්ලිෆයර් 1 හි ප්\u200dරතිලෝම (ධනාත්මක) ආදානය මෙය නොවේ.
එය මත ඇති ආදාන වෝල්ටීයතාව පින් 2 හි වෝල්ටීයතාවයට වඩා අඩු නම්, මෙම ඇම්ප්ලිෆයරයේ ප්\u200dරතිදානයේ දෝෂ 1 නොතිබෙනු ඇත, වෝල්ටීයතාවයක් නොමැත (ප්\u200dරතිදානයට ඇත පහත් මට්ටම) සහ එය නිමැවුම් ස්පන්දනවල පළල (තීරු චක්\u200dරය) කෙරෙහි කිසිදු බලපෑමක් ඇති නොකරනු ඇත.
මෙම පින් එකේ වෝල්ටීයතාව පින් 2 ට වඩා වැඩි නම්, මෙම ඇම්ප්ලිෆයර් 1 හි ප්\u200dරතිදානයේදී වෝල්ටීයතාවයක් දිස්වනු ඇත (ඇම්ප්ලිෆයර් 1 හි ප්\u200dරතිදානය ඉහළ මට්ටමක පවතී) සහ ප්\u200dරතිදාන ස්පන්දනවල පළල (තීරු චක්\u200dරය) වැඩි වන තරමට මෙම ඇම්ප්ලිෆයරයේ ප්\u200dරතිදාන වෝල්ටීයතාව වැඩි වේ (උපරිම වෝල්ට් 3.3).
නිගමනය 2
දෝෂ ඇම්ප්ලිෆයර් 1 හි ප්\u200dරතිලෝම (negative ණ) ආදානය මෙයයි.
මෙම පින් එකෙහි ආදාන වෝල්ටීයතාව පින් 1 ට වඩා වැඩි නම්, ඇම්ප්ලිෆයරයේ ප්\u200dරතිදානයේ වෝල්ටීයතා දෝෂයක් ඇති නොවනු ඇත (ප්\u200dරතිදානය අඩු වනු ඇත) සහ එය ප්\u200dරතිදානයේ පළල (තීරු චක්\u200dරය) කෙරෙහි කිසිදු බලපෑමක් ඇති නොකරනු ඇත. ස්පන්දන.
මෙම පින් එකෙහි වෝල්ටීයතාව පින් 1 ට වඩා අඩු නම්, ඇම්ප්ලිෆයර් ප්\u200dරතිදානය ඉහළට යයි.
දෝෂ ඇම්ප්ලිෆයර් යනු නියත වෝල්ටීයතාවයකින් \u003d 70..95 dB අනුපිළිවෙලෙහි වාසියක් සහිත සාමාන්\u200dය ඔප-ඇම්ප් (350 kHz සංඛ්\u200dයාතයක Ku \u003d 1). Op-amp ආදාන වෝල්ටීයතා පරාසය -0.3V සිට සැපයුම් වෝල්ටීයතාව දක්වා විහිදේ, 2 ණ 2V. එනම්, උපරිම ආදාන වෝල්ටීයතාවය සැපයුම් වෝල්ටීයතාවයට වඩා අවම වශයෙන් වෝල්ට් දෙකක්වත් අඩු විය යුතුය.
නිගමනය 3
ඩයෝඩ (OR පරිපථය) හරහා මෙම පින් එකට සම්බන්ධ කර ඇති දෝෂ ඇම්ප්ලිෆයර් 1 සහ 2 වල ප්\u200dරතිදානයන් මේවා වේ. ඕනෑම ඇම්ප්ලිෆයරයක ප්\u200dරතිදානයේ වෝල්ටීයතාවය අඩු සිට ඉහළට වෙනස් වන්නේ නම්, පින් 3 දී එය ද ඉහළට යයි.
මෙම අග්\u200dරයේ වෝල්ටීයතාවය 3.3 V ඉක්මවා ගියහොත්, මයික්\u200dරො චක්\u200dරයේ ප්\u200dරතිදානයේ ඇති ස්පන්දන අතුරුදහන් වේ (ශුන්\u200dය තීරුබදු චක්\u200dරය).
මෙම පින් එකෙහි වෝල්ටීයතාව 0 V ට ආසන්න නම්, එවිට නිමැවුම් ස්පන්දන කාලය (තීරු චක්\u200dරය) උපරිම වේ.
පින් 3 සාමාන්\u200dයයෙන් ඇම්ප්ලිෆයර් සඳහා ප්\u200dරතිපෝෂණය සැපයීමට භාවිතා කරයි, නමුත් අවශ්\u200dය නම් ස්පන්දන පළලෙහි වෙනසක් සැපයීම සඳහා ආදාන ලෙස පින් 3 භාවිතා කළ හැකිය.
එය හරහා වෝල්ටීයතාව ඉහළ නම් (\u003e ~ 3.5 V), එවිට MS ප්\u200dරතිදානයේදී ස්පන්දන නොමැත. බල සැපයුම කිසිදු තත්වයක් යටතේ ආරම්භ නොවේ.
නිගමනය 4
එය "මළ" වේලාවේ විචල්\u200dයතා පරාසය පාලනය කරයි (එන්ජින් ඩෙඩ්-ටයිම් කන්ට්\u200dරෝල්), ප්\u200dරතිපත්තිමය වශයෙන්, මෙය එකම රාජකාරි චක්\u200dරයයි.
එය හරහා ඇති වෝල්ටීයතාව 0 V ට ආසන්න නම්, එවිට මයික්\u200dරො චක්\u200dරයේ ප්\u200dරතිදානය හැකි උපරිම හා උපරිම ස්පන්දන පළල වන අතර, ඒ අනුව වෙනත් ආදාන සං als ා මඟින් සැකසිය හැකිය (දෝෂ ඇම්ප්ලිෆයර්, පින් 3).
මෙම පින් එකෙහි වෝල්ටීයතාව 1.5 V පමණ නම්, එවිට නිමැවුම් ස්පන්දනවල පළල ඒවායේ උපරිම පළලින් 50% ක් පමණ වේ.
මෙම පින් එකෙහි වෝල්ටීයතාවය 3.3 V ඉක්මවා ගියහොත් එම්එස් නිමැවුමේ ස්පන්දන නොමැත. බල සැපයුම කිසිදු තත්වයක් යටතේ ආරම්භ නොවේ.
නමුත් "මළ" කාලය වැඩි වීමත් සමඟ පීඩබ්ලිව්එම් ගැලපුම් පරාසය අඩු වන බව අමතක නොකරන්න.
පින් 4 හි වෝල්ටීයතාව වෙනස් කිරීමෙන්, ඔබට "මළ" වේලාවේ (ආර්ආර් බෙදුම්කරු) ස්ථාවර පළලක් සැකසිය හැකිය, බල සැපයුමේ (ආර්සී දාමය) මෘදු ආරම්භක මාදිලියක් ක්\u200dරියාත්මක කරන්න, එම්එස් (යතුර) දුරස්ථව වසා දැමීම සපයන්න, තවද ඔබට මෙම පින් එක රේඛීය පාලන ආදානයක් ලෙස භාවිතා කළ හැකිය.
“නොදන්නා අය සඳහා” “මළ” කාලය සහ එය කුමක් සඳහාද යන්න සලකා බලමු.
බල සැපයුම් තල්ලු-ඇදීමේ පරිපථය ක්\u200dරියාත්මක වන විට, ස්පන්දන විකල්ප වශයෙන් මයික්\u200dරො චක්\u200dරයේ ප්\u200dරතිදානයේ සිට ප්\u200dරතිදාන ට්\u200dරාන්සිස්ටරවල පාදම (ගේට්ටු) වෙත සපයනු ලැබේ. ඕනෑම ට්\u200dරාන්සිස්ටරයක් \u200b\u200bඅවස්ථිති මූලද්\u200dරව්\u200dයයක් බැවින්, ප්\u200dරතිදාන ට්\u200dරාන්සිස්ටරයේ පාදම (ගේට්ටුව) වෙතින් සං signal ාව ඉවත් කළ විට (යොදන විට) එය ක්ෂණිකව වසා දැමිය නොහැක. “මිය ගිය” වේලාවකින් තොරව නිමැවුම් ට්\u200dරාන්සිස්ටර වලට ස්පන්දන යොදනවා නම් (එනම්, ස්පන්දනය එකකින් ඉවත් කර වහාම දෙවැන්න සඳහා යොදන්න), එක් ට්\u200dරාන්සිස්ටරයක් \u200b\u200bවැසීමට කාලය නොමැති මොහොතක් පැමිණිය හැකි අතර, දෙවැන්න තිබේ දැනටමත් විවෘත කර ඇත. එවිට මුළු ධාරාවම (ධාරාව හරහා කැඳවනු ලැබේ) බර (ට්\u200dරාන්ස්ෆෝමර් එතීෙම්) මඟ හරිමින් විවෘත ට්\u200dරාන්සිස්ටර දෙක හරහා ගලා යන අතර එය කිසිම දෙයකින් සීමා නොවන බැවින් ප්\u200dරතිදාන ට්\u200dරාන්සිස්ටර ක්ෂණිකව අසාර්ථක වේ.
මෙය සිදුවීම වලක්වා ගැනීම සඳහා, එක් ආවේගයක් අවසන් වීමෙන් පසුව සහ ඊළඟ ආරම්භයට පෙර එය අවශ්\u200dය වේ - සමහරක් නිශ්චිත කාලයපාලන සං signal ාව ඉවත් කරන ආදානයෙන් ප්\u200dරතිදාන ට්\u200dරාන්සිස්ටරය විශ්වාසදායක ලෙස වසා දැමීමට ප්\u200dරමාණවත්.
මෙම කාලය "මළ" කාලය ලෙස හැඳින්වේ.
ඔව්, ඔබ මයික්\u200dරො චක්\u200dරයේ සංයුතිය සමඟ රූපය දෙස බැලුවද, 0.1-0.12 V වෝල්ටීයතා ප්\u200dරභවයක් හරහා මියගිය කාල ගැලපුම් සංසන්දකයේ (DA1) ආදානයට පින් 4 සම්බන්ධ වී ඇති බව අපට පෙනේ. මෙය සිදු කරන්නේ ඇයි? ?
මෙය හරියටම සිදු කරනුයේ නිමැවුම් ස්පන්දනයේ උපරිම පළල (තීරු චක්\u200dරය) කිසි විටෙකත් 100% ට සමාන නොවන බව සහතික කිරීම සඳහා ය ආරක්ෂිත වැඩ ප්\u200dරතිදාන (ප්\u200dරතිදාන) ට්\u200dරාන්සිස්ටර.
එනම්, ඔබ පොදු වයරය මත පින් 4 "දැමුවහොත්", DA1 සංසන්දකයේ ආදානයේ තවමත් ශුන්\u200dය වෝල්ටීයතාවයක් නොතිබෙනු ඇත, නමුත් මෙම අගය (0.1-0.12 V) සහ ස්පන්දන වලින් වෝල්ටීයතාවයක් ඇත. sawtooth වෝල්ටීයතා උත්පාදක යන්ත්රය (SPS) දර්ශණය වන්නේ මයික්\u200dරො චක්\u200dරයේ ප්\u200dරතිදානයේදී පින් 5 හි විස්තාරය මෙම වෝල්ටීයතාව ඉක්මවා ගිය විට පමණි. එනම්, නිමැවුම් ස්පන්දනවල රාජකාරි චක්\u200dරය සඳහා මයික්\u200dරො චක්\u200dරයට ස්ථාවර උපරිම සීමාවක් ඇති අතර එය ප්\u200dරතිදාන අවධියේ තනි චක්\u200dරීය ක්\u200dරියාකාරිත්වය සඳහා 95-96% නොඉක්මවන අතර තල්ලු කිරීමේ ක්\u200dරියාවලිය සඳහා 47.5-48% නිමැවුම් අදියර.
නිගමනය 5
මෙය ජීපීඑන් හි ප්\u200dරතිදානය වන අතර එය සැලසුම් කර ඇත්තේ කාල ධාරිත්\u200dරක සීටී එයට සම්බන්ධ කිරීම සඳහා වන අතර අනෙක් කෙළවර පොදු වයරයට සම්බන්ධ වේ. PWM පාලකයේ GPN ස්පන්දනවල නිමැවුම් සංඛ්\u200dයාතය මත පදනම්ව එහි ධාරිතාව සාමාන්\u200dයයෙන් 0.01 fromF සිට 0.1 μF දක්වා තෝරා ගනු ලැබේ. රීතියක් ලෙස, උසස් තත්ත්වයේ ධාරිත්\u200dරක මෙහි භාවිතා වේ.
FPG හි නිමැවුම් සංඛ්\u200dයාතය මෙම පින් එකෙන් පාලනය කළ හැකිය. උත්පාදක ප්\u200dරතිදාන වෝල්ටීයතාවයේ පැද්දීම (ප්\u200dරතිදාන ස්පන්දනවල විස්තාරය) වෝල්ට් 3 ක කලාපයේ කොතැනක හෝ තිබේ.
නිගමනය 6
ජීපීඑන් හි ප්\u200dරතිදානය, එය කාල සැකසුම් ප්\u200dරතිරෝධකයක් වන ආර්ටී සමඟ සම්බන්ධ කිරීමට අදහස් කරන අතර අනෙක් අන්තය පොදු වයරයට සම්බන්ධ වේ.
Rt සහ Ct අගයන් FPG හි නිමැවුම් සංඛ්\u200dයාතය තීරණය කරන අතර තනි චක්\u200dරීය මෙහෙයුමක් සඳහා වන සූත්\u200dරය මගින් ගණනය කරනු ලැබේ;
ද්වි-ආ roke ාත මෙහෙයුම් ක්\u200dරමයක් සඳහා, සූත්\u200dරය පහත පරිදි වේ;
වෙනත් සමාගම්වල PWM පාලකයන් සඳහා, සංඛ්\u200dයාතය ගණනය කරනු ලබන්නේ එකම සූත්\u200dරයක් භාවිතා කරමිනි, අංක 1 1.1 දක්වා වෙනස් කිරීම අවශ්\u200dය වේ.
නිගමනය 7
එය පීඩබ්ලිව්එම් පාලකයේ උපාංග පරිපථයේ පොදු වයරයට සම්බන්ධ වේ.
නිගමනය 8
මයික්\u200dරො චක්\u200dරයේ ප්\u200dරතිදාන ට්\u200dරාන්සිස්ටර දෙකක් සහිත ප්\u200dරතිදාන අවධියක් අඩංගු වන අතර ඒවා එහි ප්\u200dරතිදාන ස්විචයන් වේ. මෙම ට්\u200dරාන්සිස්ටර වල එකතුකරන්නන්ගේ සහ විමෝචකවල ප්\u200dරතිදානයන් නොමිලේ වන අතර එම නිසා අවශ්\u200dයතාවය අනුව මෙම ට්\u200dරාන්සිස්ටර පොදු විමෝචකයකු හා පොදු එකතු කරන්නෙකු සමඟ වැඩ කිරීම සඳහා පරිපථයට ඇතුළත් කළ හැකිය.
පින් 13 හි ඇති වෝල්ටීයතාවය මත පදනම්ව, මෙම නිමැවුම් අදියර තල්ලු-අදින්න හෝ තනි අදින්න ප්\u200dරකාරයේදී ක්\u200dරියාත්මක විය හැකිය. තනි ක්\u200dරියාන්විතයේදී, බර ප්\u200dරවාහය වැඩි කිරීම සඳහා මෙම ට්\u200dරාන්සිස්ටර සමාන්තරව සම්බන්ධ කළ හැකි අතර එය සාමාන්\u200dයයෙන් සිදු කෙරේ.
ඉතින්, පින් 8 යනු ට්\u200dරාන්සිස්ටර 1 හි එකතු කරන්නාගේ පින් ය.
නිගමනය 9
ට්\u200dරාන්සිස්ටර 1 හි විමෝචක පින් මෙයයි.
නිගමනය 10
ට්\u200dරාන්සිස්ටර 2 හි විමෝචක පින් එක මෙයයි.
නිගමනය 11
ට්\u200dරාන්සිස්ටර 2 එකතු කරන්නා මෙයයි.
නිගමනය 12
මෙම පින් එක TL494CN බල සැපයුමේ ධනාත්මක සම්බන්ධ කරයි.
නිගමනය 13
නිමැවුම් අවධියේ මෙහෙයුම් ආකාරය තෝරා ගැනීම සඳහා මෙය පින් එකකි. මෙම පින් එක පොදු හා සම්බන්ධ වී ඇත්නම්, ප්\u200dරතිදාන අවධිය තනි අන්තයේ ක්\u200dරියාත්මක වේ. ට්\u200dරාන්සිස්ටර ස්විචයේ පර්යන්තවල ප්\u200dරතිදාන සං als ා සමාන වේ.
ඔබ මෙම පින් එකට +5 V වෝල්ටීයතාවයක් යොදන්නේ නම් (අල්ෙපෙනති 13 සහ 14 සම්බන්ධ කරන්න), එවිට ප්\u200dරතිදාන ස්විචයන් තල්ලු-ඇදීමේ ප්\u200dරකාරයේදී ක්\u200dරියාත්මක වේ. ට්\u200dරාන්සිස්ටර ස්විචයන්හි පර්යන්තවල ප්\u200dරතිදාන සං als ා ප්\u200dරතිදේහජනක වන අතර ප්\u200dරතිදාන ස්පන්දන සංඛ්\u200dයාතය දෙගුණයක් අඩු වේ.
නිගමනය 14
මෙය ස්ථායිතාවයේ ප්\u200dරතිදානයයි සහමූලාශ්රය පිළිබඳporno එච්වෝල්ටීයතාව (යොමුව), +5 V නිමැවුම් වෝල්ටීයතාවයක් සහ 10 mA දක්වා නිමැවුම් ධාරාවක් ඇති අතර එය දෝෂ ඇම්ප්ලිෆයර්වල සංසන්දනය සඳහා සහ වෙනත් අරමුණු සඳහා භාවිතා කළ හැකිය.
නිගමනය 15
එය පින් 2 ට සමාන ආකාරයකින් ක්\u200dරියා කරයි. දෙවන දෝෂ ඇම්ප්ලිෆයර් භාවිතා නොකරන්නේ නම්, පින් 15 හුදෙක් පින් 14 (+5 V යොමුව) හා සම්බන්ධ වේ.
නිගමනය 16
එය පින් 1 ට සමාන ආකාරයකින් ක්\u200dරියා කරයි. දෙවන දෝෂ ඇම්ප්ලිෆයර් භාවිතා නොකරන්නේ නම්, එය සාමාන්\u200dයයෙන් පොදු වයරයට සම්බන්ධ වේ (පින් 7).
පින් 15 +5 V හා පින් 16 සම්බන්ධ කර ඇති අතර දෙවන ඇම්ප්ලිෆයර් වෙතින් ප්\u200dරතිදාන වෝල්ටීයතාවයක් නොමැත, එබැවින් එය IC හි ක්\u200dරියාකාරිත්වයට කිසිදු බලපෑමක් ඇති නොකරයි.
ක්ෂුද්\u200dර චක්\u200dරයේ ක්\u200dරියාකාරිත්වයේ මූලධර්මය.
ඉතින් TL494 PWM පාලකය ක්\u200dරියා කරන්නේ කෙසේද?
ඉහත, අපි මෙම මයික්\u200dරො චක්\u200dරයේ අල්මාරියේ අරමුණ සහ ඒවා ඉටු කරන ක්\u200dරියාකාරිත්වය විස්තරාත්මකව විමසා බැලුවෙමු.
මේ සියල්ල පරෙස්සමින් විශ්ලේෂණය කරන්නේ නම්, මේ සියල්ලෙන් පැහැදිලි වන්නේ මෙම මයික්\u200dරො සර්කිට් ක්\u200dරියා කරන ආකාරයයි. නමුත් එය ක්\u200dරියාත්මක වන ආකාරය මම නැවත වරක් කෙටියෙන් විස්තර කරමි.
සාමාන්\u200dයයෙන් මයික්\u200dරො චක්\u200dරය මාරු කර එයට විදුලිය සැපයීම (us ණ 7 සිට පින් 7 දක්වා, පින් 12 ට), ජීපීඑන් වෝල්ට් 3 ක පමණ විස්තාරයක් සහිත කියත් දත් ස්පන්දනය ජනනය කිරීමට පටන් ගනී, සංඛ්\u200dයාතය සී සහ ආර් මත රඳා පවතී. මයික්\u200dරො චක්\u200dරයේ 5 සහ 6 අල්ෙපෙනති සමඟ සම්බන්ධ කර ඇත.
පාලක සං als ා වල අගය (පින් 3 සහ 4 දී) වෝල්ට් 3 ට වඩා අඩු නම්, සෘජුකෝණාස්රාකාර ස්පන්දන මයික්\u200dරො චක්\u200dරයේ ප්\u200dරතිදාන යතුරු මත දිස් වේ, එහි පළල (තීරු චක්\u200dරය) පාලක සං als ා වල අගය මත රඳා පවතී. 3 සහ 4.
එනම්, මයික්\u200dරො සර්කිට් මඟින් ධාරිත්\u200dරක Ct (C1) වෙතින් ධනාත්මක sawtooth වෝල්ටීයතාවය ඕනෑම පාලන සං als ා දෙක සමඟ සංසන්දනය කරයි.
නිමැවුම් ට්\u200dරාන්සිස්ටර VT1 සහ VT2 පාලනය කිරීම සඳහා වන තාර්කික පරිපථ ඒවා විවෘත කරන්නේ කියත් දත් ස්පන්දනයේ වෝල්ටීයතාවය පාලක සං als ා වලට වඩා වැඩි වූ විට පමණි. මෙම වෙනස වැඩි වන තරමට නිමැවුම් ස්පන්දනය පුළුල් වේ (වැඩි රාජකාරි චක්\u200dරයක්).
පින් 3 හි පාලක වෝල්ටීයතාවය, මෙහෙයුම් ඇම්ප්ලිෆයර්වල (දෝෂ ඇම්ප්ලිෆයර්) යෙදවුම්වල ඇති සං als ා මත රඳා පවතී. එමඟින් PSU හි ප්\u200dරතිදාන වෝල්ටීයතාවය සහ ප්\u200dරතිදාන ධාරාව පාලනය කළ හැකිය.
මේ අනුව, පිළිවෙලින් ඕනෑම පාලන සං signal ාවක වටිනාකම වැඩි වීම හෝ අඩුවීම, මයික්\u200dරො චක්\u200dරයේ ප්\u200dරතිදානයේදී වෝල්ටීයතා ස්පන්දනයේ පළල රේඛීය අඩුවීමක් හෝ වැඩි වීමක් ඇති කරයි.
ඉහත සඳහන් කළ පරිදි, පින් 4 හි වෝල්ටීයතාව (මිය ගිය කාල පාලනය), දෝෂ ඇම්ප්ලිෆයර්වල යෙදවුම් හෝ පින් 3 වෙතින් සෘජුවම ප්\u200dරතිපෝෂණ සං input ා ආදාන පාලක සං als ා ලෙස භාවිතා කළ හැකිය.
න්\u200dයාය පවසන පරිදි න්\u200dයාය, නමුත් මේ සියල්ල ප්\u200dරායෝගිකව බැලීමට හා දැනීමට වඩා හොඳ වනු ඇත, එබැවින් අපි පහත පරිපථය පාන් පුවරුවක තබා එය සියල්ල ක්\u200dරියාත්මක වන ආකාරය අපගේම දෑසින් බලමු.

සරලම සහ ඉක්මන් මාර්ගය - මේ සියල්ල පාන් පුවරුවක එකතු කරන්න. ඔව්, මම KA7500 මයික්\u200dරො සර්කිට් ස්ථාපනය කළා. මම මයික්\u200dරො චක්\u200dරීයයේ “13” පින් එක පොදු කම්බියක් මත තැබුවෙමි, එනම් අපගේ ප්\u200dරතිදාන ස්විචයන් තනි චක්\u200dරීය ආකාරයකින් ක්\u200dරියා කරයි (ට්\u200dරාන්සිස්ටරවල සං als ා සමාන වනු ඇත), සහ ප්\u200dරතිදාන ස්පන්දනවල පුනරාවර්තන වේගය GPN sawtooth වෝල්ටීයතාවයේ සංඛ්\u200dයාතයට අනුරූප වේ.

මම පහත දැක්වෙන පාලන ලක්ෂ්\u200dයයන්ට ඔසිලෝස්කෝප් සම්බන්ධ කළෙමි:
- මෙම පින් එකෙහි නියත වෝල්ටීයතාවය පාලනය කිරීම සඳහා "4" ඇණ ගැසූ පළමු කිරණ. තිරයේ මධ්\u200dයයේ ශුන්\u200dය රේඛාවේ පිහිටා ඇත. සංවේදීතාව - කොටසකට වෝල්ට් 1;
- එෆ්පීජී හි කියත් දත් වෝල්ටීයතාවය පාලනය කිරීම සඳහා "5" ඇලවීම සඳහා දෙවන කිරණ. එය දෝලන දර්ශකයේ මධ්\u200dයයේ හා එකම සංවේදීතාවයකින් යුත් ශුන්\u200dය රේඛාවේ (බාල්ක දෙකම පෙලගැසී ඇත) පිහිටා ඇත;
- මයික්\u200dරො චක්\u200dරයේ ප්\u200dරතිදානයේ තුන්වන කිරණ “9” ඇලවීම, මයික්\u200dරො චක්\u200dරයේ ප්\u200dරතිදානයේදී ස්පන්දන පාලනය කිරීම. කදම්භයේ සංවේදීතාව එක් අංශයකට වෝල්ට් 5 කි (වෝල්ට් 0.5 ක්, බෙදීමක් 10 කින්). දෝලන තිරයේ පතුලේ පිහිටා ඇත.

මට කියන්නට අමතක විය, මයික්\u200dරො චක්\u200dරයේ ප්\u200dරතිදාන යතුරු පොදු එකතු කරන්නකුට සම්බන්ධ කර ඇත. වෙනත් වචන වලින් කිවහොත් - විමෝචක අනුගාමික යෝජනා ක්\u200dරමයට අනුව. පුනරාවර්තකයක් ඇයි? ට්\u200dරාන්සිස්ටරයේ විමෝචකයේ ඇති සං signal ාව පාදමේ සං signal ාව හරියටම පුනරාවර්තනය කරන නිසා අපට සියල්ල පැහැදිලිව දැකගත හැකිය.
ඔබ ට්\u200dරාන්සිස්ටරයේ එකතු කරන්නාගෙන් සං signal ාව ලබා ගන්නේ නම්, එය මූලික සං .ාවට සාපේක්ෂව ප්\u200dරතිලෝමව (උඩු යටිකුරු කරනු ලැබේ).
අපි මයික්\u200dරො චක්\u200dරයට විදුලිය සපයන අතර ප්\u200dරතිදානයන්හි ඇති දේ අපි බලමු.
සිව්වන පාදයේ අපට ශුන්\u200dයයක් ඇත (ට්\u200dරයිමරයේ ස්ලයිඩරය පහළම ස්ථානයේ ඇත), පළමු කිරණ තිරයේ මධ්\u200dයයේ ඇති ශුන්\u200dය රේඛාව මත වේ. දෝෂ ඇම්ප්ලිෆයර් ද ක්\u200dරියා නොකරයි.
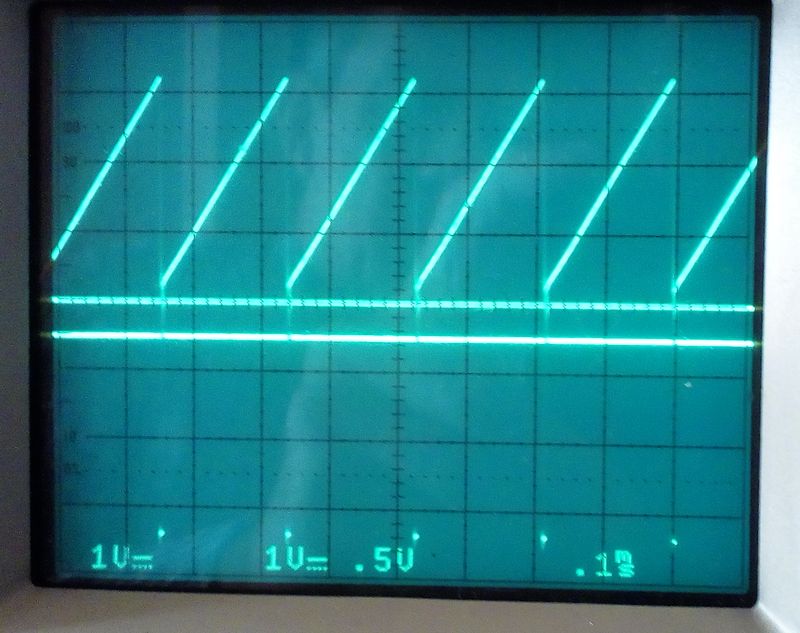
පස්වන පාදයේ, ජීපීඑන් (දෙවන කදම්භයේ) කියත් දත් වෝල්ටීයතාවයක් අපට පෙනේ, විස්තාරය වෝල්ට් 3 ට වඩා තරමක් වැඩි ය.
මයික්\u200dරො චක්\u200dරයේ (පින් 9) නිමැවුමේදී අපට පෙනෙන්නේ සෘජුකෝණාස්රාකාර ස්පන්දන වන අතර එහි විස්තාරය වෝල්ට් 15 ක් පමණ වන අතර උපරිම පළල (96%) වේ. තිරයේ පතුලේ ඇති තිත් හරියටම ස්ථාවර තීරු චක්\u200dරයේ එළිපත්තයි. දැකීම පහසු කිරීම සඳහා, දෝලනය මත දිගු කිරීම සක්\u200dරිය කරන්න.

හොඳයි, දැන් ඔබට වඩා හොඳින් දැක ගත හැකිය. ස්පන්දන විස්තාරය ශුන්\u200dයයට වැටෙන අතර ප්\u200dරතිදාන ට්\u200dරාන්සිස්ටරය වසා ඇති කාලය මෙයයි. කෙටි කාලයක්... මෙම කදම්භය සඳහා ශුන්\u200dය මට්ටම තිරයේ පතුලේ ඇත.
හොඳයි, "4" පින් කිරීමට වෝල්ටීයතාවය එකතු කර අපට ලැබෙන දේ බලමු.

කපන ප්\u200dරතිරෝධකයක් සහිත පින් 4 හි, මම නියත වෝල්ටීයතාව 1 වෝල්ටීයතාවයක් සකසා, පළමු කදම්භය එක් අංශයක් දක්වා ඉහළට (ඔසිලෝස්කෝප් තිරයේ සරල රේඛාවක්). අප දකින්නේ කුමක්ද? මළ කාලය වැඩි වී ඇත (රාජකාරි චක්\u200dරය අඩු වී ඇත), මෙය තිරයේ පතුලේ ඇති තිත් රේඛාවයි. එනම්, ප්\u200dරතිදාන ට්\u200dරාන්සිස්ටරය ස්පන්දනයේ කාලයෙන් අඩක් පමණ දැනටමත් වසා ඇත.
මයික්\u200dරො චක්\u200dරයේ "4" ඇලවීම සඳහා ට්\u200dරයිමරයක් සමඟ තවත් වෝල්ට් එකක් එක් කරන්න.

පළමු කිරණ තවත් එක් අංශයක් දක්වා ඉහළ ගිය බව අපට පෙනේ, නිමැවුම් ස්පන්දන කාලසීමාව ඊටත් වඩා කෙටි විය (සමස්ත ස්පන්දනයේ කාලයෙන් 1/3), සහ මිය ගිය කාලය (ප්\u200dරතිදාන ට්\u200dරාන්සිස්ටරයේ අවසන් කාලය) දෙකට වැඩි විය තුනෙන් දෙකක්. එනම්, මයික්\u200dරො චක්\u200dරයේ තර්කනය FPG සං signal ාවේ මට්ටම පාලක සං signal ාවේ මට්ටම සමඟ සංසන්දනය කර ප්\u200dරතිදානය වෙත යොමු වන්නේ එම FPG සං signal ාව පමණක් වන අතර එහි මට්ටම පාලක සං .ාවට වඩා ඉහළ අගයක් ගනී.
එය වඩාත් පැහැදිලි කර ගැනීම සඳහා - මයික්\u200dරො චක්\u200dරයේ නිමැවුම් ස්පන්දනයේ කාලසීමාව (පළල) පාලක සං signal ාවේ මට්ටමට වඩා (සරල රේඛාවට ඉහළින්) කියත් දත් වෝල්ටීයතාවයේ ප්\u200dරතිදාන ස්පන්දනයේ කාලයට (පළල) සමාන වේ. oscilloscope තිරයේ).

ඉදිරියට යන්න, මයික්\u200dරො චක්\u200dරයේ "4" ඇලවීමට තවත් වෝල්ට් එකක් එක් කරන්න. අප දකින්නේ කුමක්ද? මයික්\u200dරො චක්\u200dරයේ නිමැවුමේදී, ඉතා කෙටි ස්පන්දන පළල දළ වශයෙන් සමාන වන අතර එය sawtooth වෝල්ටීයතාවයේ ඉහළ කෙළවරේ line ජු රේඛාවට ඉහළින් නෙරා යයි. ස්පන්දනය වඩා හොඳින් දැකිය හැකි වන පරිදි ඔසිලෝස්කෝපය මත දිගු කිරීම සක්\u200dරිය කරමු.

මෙන්න, අපි කෙටි ස්පන්දනයක් දකිමු, එම කාලය තුළ ප්\u200dරතිදාන ට්\u200dරාන්සිස්ටරය විවෘත වන අතර ඉතිරි කාලය (තිරයේ පහළ රේඛාව) වසා දමනු ඇත.
හොඳයි, වෝල්ටීයතාව "4" හි ඊටත් වඩා වැඩි කිරීමට උත්සාහ කරමු. අපි ප්\u200dරතිදානයේදී වෝල්ටීයතාව FPV sawtooth වෝල්ටීයතාවයට වඩා ට්\u200dරයිමර් ප්\u200dරතිරෝධකයක් සමඟ සකසමු.

හොඳයි, සෑම දෙයක්ම, බල සැපයුම් ඒකකය අප වෙනුවෙන් වැඩ කිරීම නවත්වනු ඇත, මන්ද ප්රතිදානය සම්පූර්ණයෙන්ම සන්සුන් ය. පාලක පින් "4" හි අපට නියත වෝල්ටීයතා මට්ටමක් වෝල්ට් 3.3 ට වඩා වැඩි බැවින් ප්\u200dරතිදාන ස්පන්දන නොමැත.
ඔබ පාලක සං signal ාවක් "3" පින් කිරීමට හෝ කිසියම් දෝෂ ඇම්ප්ලිෆයරයකට යොදන්නේ නම් එය හරියටම සිදුවනු ඇත. උනන්දුවක් දක්වන ඕනෑම කෙනෙකුට, ඔබට එය ආනුභවිකව පරීක්ෂා කළ හැකිය. එපමණක් නොව, පාලක සං als ා වහාම සියලු පාලන ප්\u200dරතිදානයන්හි තිබේ නම්, මයික්\u200dරො චක්\u200dරය පාලනය කරන්න (පවතින), එම පාලන ප්\u200dරතිදානයෙන් සං signal ාවක් ලැබෙනු ඇත, එහි විස්තාරය වැඩි වේ.
හොඳයි, පොදු වයරයෙන් පින් "13" විසන්ධි කර එය "14" පින් එකට සම්බන්ධ කිරීමට උත්සාහ කරමු, එනම්, ප්\u200dරතිදාන යතුරු වල ක්\u200dරියාකාරී මාදිලිය තනි චක්\u200dරයේ සිට තල්ලු-අදින්න. අපි බලමු මොකක්ද කියලා.

ටි\u200d්\u200dරමරයක් මගින් අපි නැවතත් වෝල්ටීයතාව “4” හි ශුන්\u200dයයට ගෙනෙමු. අපි බලය ක්\u200dරියාත්මක කරමු. අප දකින්නේ කුමක්ද?
මයික්\u200dරො චක්\u200dරයේ නිමැවුමේ දී, උපරිම කාල පරිච්ඡේදයේ සෘජුකෝණාස්රාකාර ස්පන්දන ද ඇත, නමුත් ඒවායේ පුනරාවර්තන වේගය කියත් දත් ස්පන්දනයේ සංඛ්\u200dයාතයෙන් අඩක් බවට පත්ව ඇත.
එකම ස්පන්දන මයික්\u200dරො චක්\u200dරයේ දෙවන යතුරු ට්\u200dරාන්සිස්ටරයේ (පින් 10) ඇති අතර, ඒවාට සාපේක්ෂව අංශක 180 කින් කාලයාගේ ඇවෑමෙන් මාරු වේ.
උපරිම තීරුබදු චක්\u200dරීය එළිපත්ත (2%) ද ඇත. දැන් එය නොපෙනේ, ඔබට දෝලන දර්ශකයේ 4 වන කදම්භය සම්බන්ධ කර ප්\u200dරතිදාන සං sign ා දෙක එකට සම්බන්ධ කළ යුතුය. සිව්වන පරීක්ෂණය අත ළඟ නැත, එබැවින් මම එසේ නොකළෙමි. කාට අවශ්\u200dයද, මේ ගැන සහතික වීමට ප්\u200dරායෝගිකව එය ඔබම පරීක්ෂා කරන්න.
මෙම ප්\u200dරකාරයේදී, මයික්\u200dරො සර්කිට් ක්\u200dරියාත්මක වන්නේ තනි-චක්\u200dරීය මාදිලියේ ආකාරයටම වන අතර මෙහි ඇති එකම වෙනස වන්නේ නිමැවුම් ස්පන්දනවල උපරිම කාලසීමාව මුළු ස්පන්දන කාලයෙන් 48% නොඉක්මවන බවයි.
එබැවින් අපි මෙම මාදිලිය දීර් time කාලයක් තිස්සේ සලකා බලන්නේ නැත, නමුත් පින් "4" හි වෝල්ටීයතාවය වෝල්ට් දෙකක් වන විට අපට ඇති වන ආවේගයන් මොනවාදැයි බලන්න.

අපි ප්\u200dරතිරෝධකයකින් වෝල්ටීයතාව ඉහළ නංවන්නෙමු. නිමැවුම් ස්පන්දනවල පළල මුළු ස්පන්දන කාලයෙන් 1/6 දක්වා අඩු වී ඇත, එනම් එය නිමැවුම් ස්විචයන්හි තනි චක්\u200dරයේ ක්\u200dරියාකාරිත්වයට වඩා හරියටම දෙගුණයක් වේ (1/3 ගුණයක් ඇත).
දෙවන ට්\u200dරාන්සිස්ටරයේ (ටර්මිනල් 10) පර්යන්තයේ එකම ස්පන්දන ඇති අතර එය කාලයාගේ ඇවෑමෙන් අංශක 180 කින් පමණක් මාරු වේ.
හොඳයි, ප්\u200dරතිපත්තිමය වශයෙන්, අපි පීඩබ්ලිව්එම් පාලකයේ වැඩ විශ්ලේෂණය කර ඇත්තෙමු.
"4" නිගමනය පිළිබඳ වැඩි විස්තර. කලින් සඳහන් කළ පරිදි, බල සැපයුම මෘදු ලෙස ආරම්භ කිරීම සඳහා මෙම පින් භාවිතා කළ හැකිය. මෙය සංවිධානය කරන්නේ කෙසේද?
හරිම සරලයි. මෙය සිදු කිරීම සඳහා, RC දාමය "4" පින් කිරීමට සම්බන්ධ කරන්න. උදාහරණයක් ලෙස, රූප සටහනේ කොටසක් මෙන්න:

මෘදු ආරම්භයක් මෙහි ක්\u200dරියාත්මක වන්නේ කෙසේද? අපි රූප සටහන දෙස බලමු. ප්\u200dරතිරෝධක R5 හරහා ධාරිත්\u200dරක C1 අයන (+5 වෝල්ට්) සමඟ සම්බන්ධ වේ.
මයික්\u200dරො චක්\u200dරයට (පින් 12) බලය යොදන විට +5 වෝල්ට් පින් 14 හි දිස්වේ. ධාරිත්\u200dරක C1 අයකිරීම ආරම්භ කරයි. ප්\u200dරතිරෝධක R5 හරහා, ධාරිත්\u200dරකයේ ආරෝපණ ධාරාව ගලා යන අතර, එය ක්\u200dරියාත්මක වන මොහොතේ උපරිම වේ (ධාරිත්\u200dරකය විසර්ජනය වේ) සහ ප්\u200dරතිරෝධකය හරහා වෝල්ට් 5 ක වෝල්ටීයතා පහත වැටීමක් සිදු වන අතර එය "4" පින් කිරීමට පෝෂණය වේ. මෙම වෝල්ටීයතාවය, අප දැනටමත් ආනුභවිකව සොයාගෙන ඇති පරිදි, මයික්\u200dරො චක්\u200dරයේ ප්\u200dරතිදානයට ස්පන්දන ගමන් කිරීම තහනම් කරයි.
ධාරිත්\u200dරකය ආරෝපණය වන විට, ආරෝපණ ධාරාව අඩු වන අතර, ඒ අනුව, ප්\u200dරතිරෝධකය හරහා වෝල්ටීයතා පහත වැටීම අඩු වේ. පින් "4" හි වෝල්ටීයතාවය ද අඩු වන අතර මයික්\u200dරො චක්\u200dරයේ ප්\u200dරතිදානයේදී ස්පන්දන දර්ශණය වීමට පටන් ගනී, එහි කාලසීමාව ක්\u200dරමයෙන් වැඩි වේ (ධාරිත්\u200dරක ආරෝපණය වන පරිදි). ධාරිත්\u200dරකය සම්පුර්ණයෙන්ම ආරෝපණය වූ විට, ආරෝපණ ධාරාව නතර වන අතර, පින් "4" හි වෝල්ටීයතාවය ශුන්\u200dයයට ආසන්න වන අතර, පින් "4" තවදුරටත් ප්\u200dරතිදාන ස්පන්දන කාලයට බලපාන්නේ නැත. බල සැපයුම එහි මෙහෙයුම් මාදිලියට යයි.
ස්වාභාවිකවම, ඔබ අනුමාන කළේ බල සැපයුම් ඒකකයේ ආරම්භක කාලය (එය මෙහෙයුම් මාදිලියට ඇතුළු වීම) ප්\u200dරතිරෝධකයේ සහ ධාරිත්\u200dරකයේ ප්\u200dරමාණය මත රඳා පවතින අතර ඒවා තෝරා ගැනීමෙන් මෙම කාලය නියාමනය කළ හැකි වනු ඇත.
හොඳයි, මෙය සමස්ත න්\u200dයාය හා භාවිතයේ සංක්ෂිප්ත සාරාංශයක් වන අතර මෙහි විශේෂයෙන් සංකීර්ණ කිසිවක් නොමැති අතර, මෙම පීඩබ්ලිව්එම් හි ක්\u200dරියාකාරිත්වය ඔබ තේරුම් ගෙන තේරුම් ගන්නේ නම්, අනෙක් අයගේ කාර්යයන් තේරුම් ගැනීමට සහ තේරුම් ගැනීමට ඔබට අපහසු නොවනු ඇත. පීඩබ්ලිව්එම්.
හැමෝටම සුබ පැතුම්.